
정보가 없습니다.
피츄팀 - 친환경 자동차 충전 자율주행 로봇
- 이선재
- 국립인천대학교
- 작품구분일반형
- 공개여부비공개(첨부파일)
- 카테고리전자, 전기
- 등록일2023-02-15
- 팀원(공동개발자)이선재, 임수현, 강혜진, 고유나, 이수아, 박채훈
- 출품 경진대회2022년 미래형자동차 기술융합혁신인재 양성사업 산학 프로젝트
- 0
- 0
- 3,923
상세설명
1. 수행배경
- 최근 친환경 모빌리티의 수요가 늘며 전기차 충전소에 대한 수요가 덩달아
늘어나고 있는 추세이다. 전기차 충전소의 수요가 증가하며 전기차 충전소가
부족해 충전소를 찾고 기다리느라 어려움을 겪었던 전기차 운전자들의 고충을
해결하기 위해 효율적인 전기차 충전 인프라 구축하기 위해 과제를 진행하였다.
전기차 충전은 충전속도나 비용, 공간문제 등 다양한 요인을 고려해야 하는데
전기차 충전로봇이 활성화 되면 자율주행기능을 탑재한 전기차 충전 로봇을 통해
로봇이 실시간데이터를 통해 직접 차량을 찾아가 충전을 완료하여 따로 전기차
충전소와 전기차 주차공간에 제약을 받지 않고 충전의 안정성 또한 보장된다.
2. 수행기간
- 2023 년 1 월 16 일 ~ 2023 년 2월 3일
3. 개발작품 설명
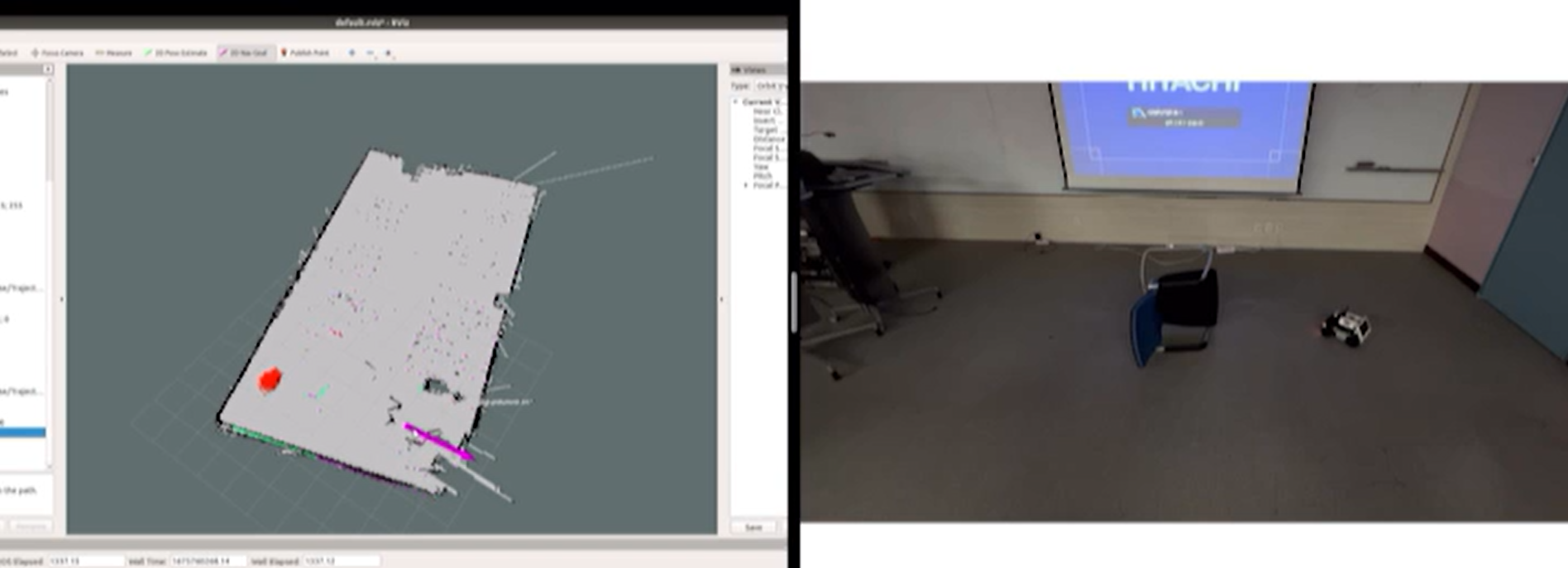
- 자율주행 로봇이 주변환경을 이해하고 목표지점으로 이동하기 위해서는 센서와
actuator(모터)가 필요하다. 본 과제에서는 2D LiDAR와 IMU 그리고 모터가 탑재된
WEGO사의 LIMO를 활용하여 개발했고, 센서와 actuator들이 알고리즘과 통신할 수
있도록 소프트웨어 개발환경 ROS(Robot Operating Software)를 적용했다. 이렇게 구
성된 플랫폼을 활용하여 map을 식별하고, 주행에 적용하여 자율주행 시스템을 구축
했다
4. 활용방안
- 본 과제 Linux os 기반 ROS 를 통해 자율주행 충전 로봇이 주어진 장소를 mapping 하고 목
표 지점까지 자율 주행 충전 로봇이 장애물을 피해 직접 목표 차량을 찾아가 충전하는 시스
템을 구현하였다. 해당 시스템을 통해 앞으로 수요가 늘어날 전기차 충전 시스템에 대한 해
결책이 될 것으로 예상된다. 또한 충전 후 차량과 분리되어 다시 재자리로 돌아옴으로서 전
기차 과충전으로 인한 문제도 예방할 수 있을 것으로 기대된다.
소개 영상
소개 슬라이드
정보가 없습니다.
기타자료
비공개 자료입니다.