
정보가 없습니다.
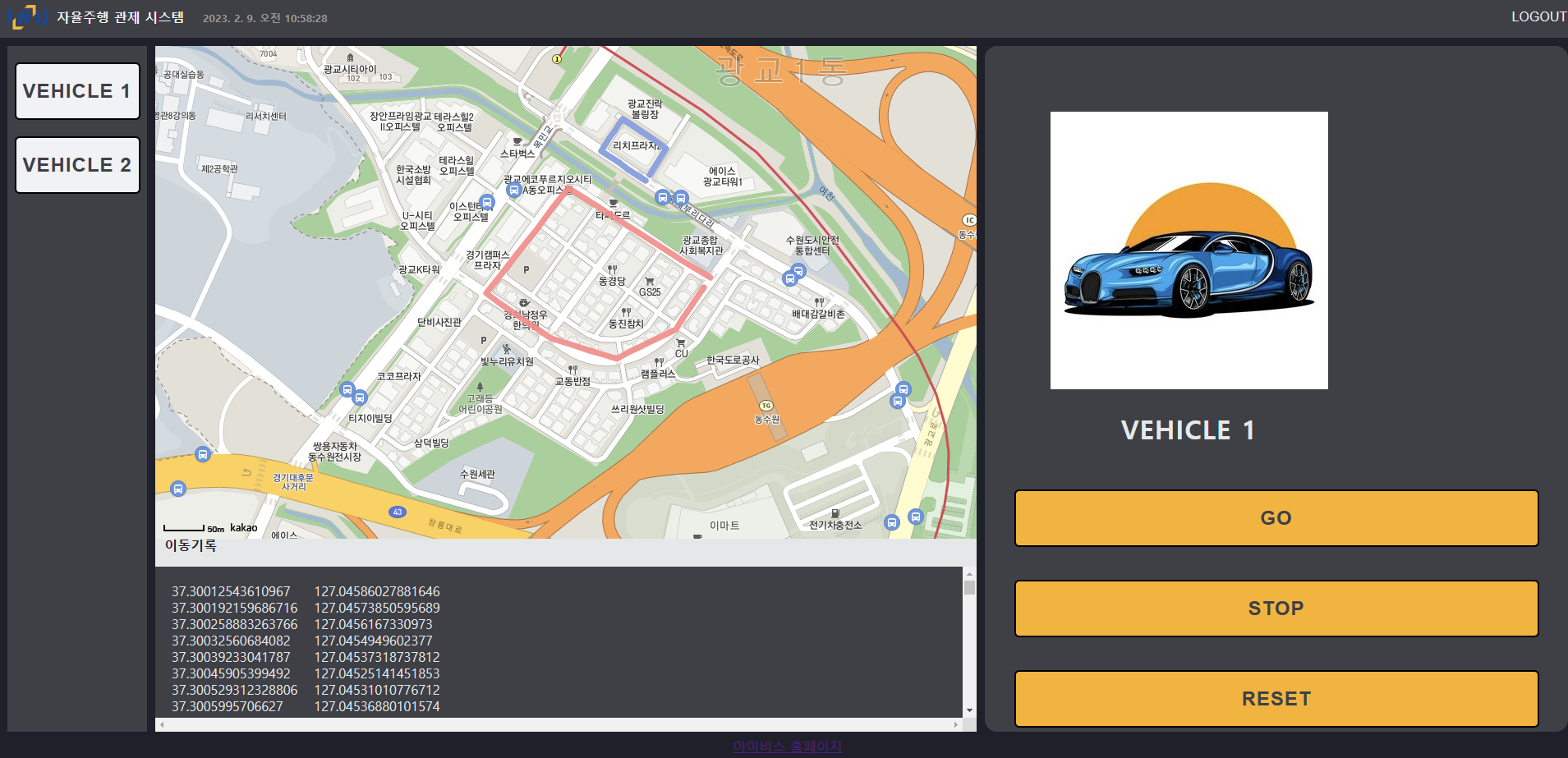
미래모빌리티의 관제 시스템 (카레이서)
- 임지훈
- 인천대학교
- 작품구분일반형
- 공개여부공개
- 카테고리정보
- 등록일2023-02-16
- 팀원(공동개발자)학생 4명 ,멘토 1명, 산업체 멘토 1명
- 출품 경진대회2022년 미래형자동차 기술융합혁신인재 양성사업 산학 프로젝트
- 0
- 0
- 1,007
상세설명
1. 수행배경
-
자율주행 모빌리티의관한 연구가 계속하여 발전하고 있음에 따라 모빌리티시스템의 제어나, 관리 분야의 중요성이 강조되고 있다. 이에 본 프로젝트는 ㈜아이비스에서개발중인 자율 주행 모빌리티의관제 웹 모델을 만드는 것이며, 실제 좌표를 입력하여 경로를 보여주고 제어할 수 있는 기능이 있는 웹이다.
본 프로젝트의 목적은 자율주행 모빌리티의관리를 수행할 수 있는 웹을 개발하는 것이다
2. 수행기간
-
1
일정 계획 세우기 및 개발 환경 구축
2
관제 시스템을 실행할 WEP PAGE 구축
3
전체적인 기능과 WEP 페이지들의 구축, 회사 소개 동영상 소재 탐색
4
최종보고서 및 학술 포스터 제작과 회사 소개 동영상 제작
3. 개발작품 설명
- 최종보고서로 대체
4. 활용방안
-
실제로 자율주행 모델은 계속해서 발전되고 있는 만큼 이러한 모빌리티의관제 시스템은 필수적으로 개발 되어야 한다. 이에 하여 주어진 좌표를 입력 하였을 때 관제시스템 상에서 모빌리티모델이 정확하게 이동하는지를 보는 것이 목표이며 더욱 자세한 값을 처리하기 위해 좌표 사이의 값을 세세하게 구하여 정확한 모델을 구현한다면 오차범위가 적은 자율주행 모빌리티 관제 시스템이 구현될 것이다.
소개 영상
소개 슬라이드
정보가 없습니다.