

캐리어 모양의 시각장애인 자율주행 로봇
- 박요셉
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자, 전기, 기계
- 등록일2023-08-06
- 팀원(공동개발자)박요셉,김민성,이예지,강경완
- 출품 경진대회2023학년도 1학기 LINC3.0 캡스톤디자인 경진대회
- 0
- 1
- 1,063
상세설명
1. 수행배경
교내 시각장애인 학생이 학생들의 이동시간이 잦은 점심시간에 이를 인지하지 못하고 사람들이 집중된 곳으로 향하는 모습이나 장애물과 부딪힐뻔한 모습, 원하는 강의실 건물을 찾기 어려워하는 모습 등을 목격하면서 문제를 인식하게 되었다.
장애학생을 도와주는 근로학생이 있지만 항상 옆에서 도와주기 어려운 상황이며, 교내에 시각장애인들을 유도해주는 블록이 계단과 건물 입구에만 설치되어 길을 찾기 어렵다.
그래서 이런 문제를 해결하기 위해 시각장애인이 교내에서 혼자서도 안전하고 정확하게 이동할 수 있는 ‘시각장애인 교내 자율주행 유도 시스템’을 고안하였다.
2. 수행기간

3. 개발작품 설명
방대한 양의 데이터를 연산해야 하므로 연산성능이 좋고 CUDA 코어를 사용가능한 Jetson Nano를 메인보드로 선정하였다.
자율주행 시스템을 제작하기 용이한 ROS2 플랫폼을 선정하였다.
ROS2 내부 지원기능인 SLAM과 NAV2를 이용하여 지도 시스템 구축및 목적지 경로탐색, 장애물 회피기능을 구현하였다.
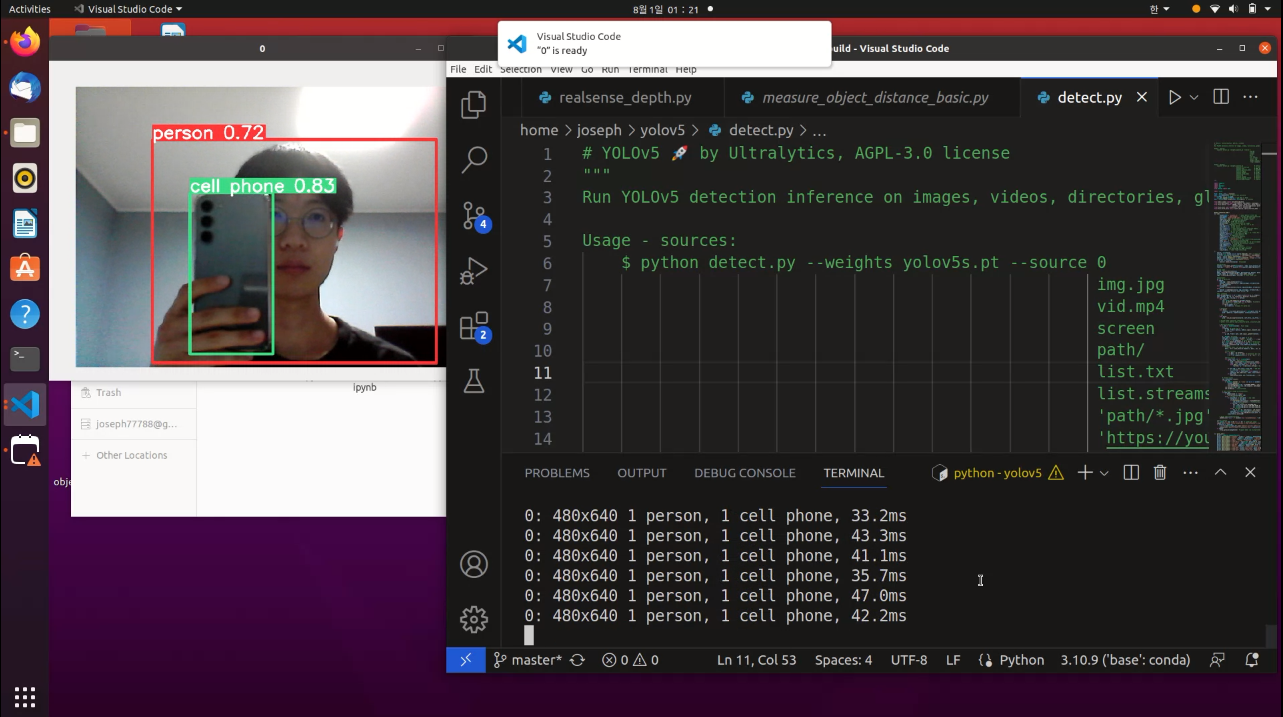
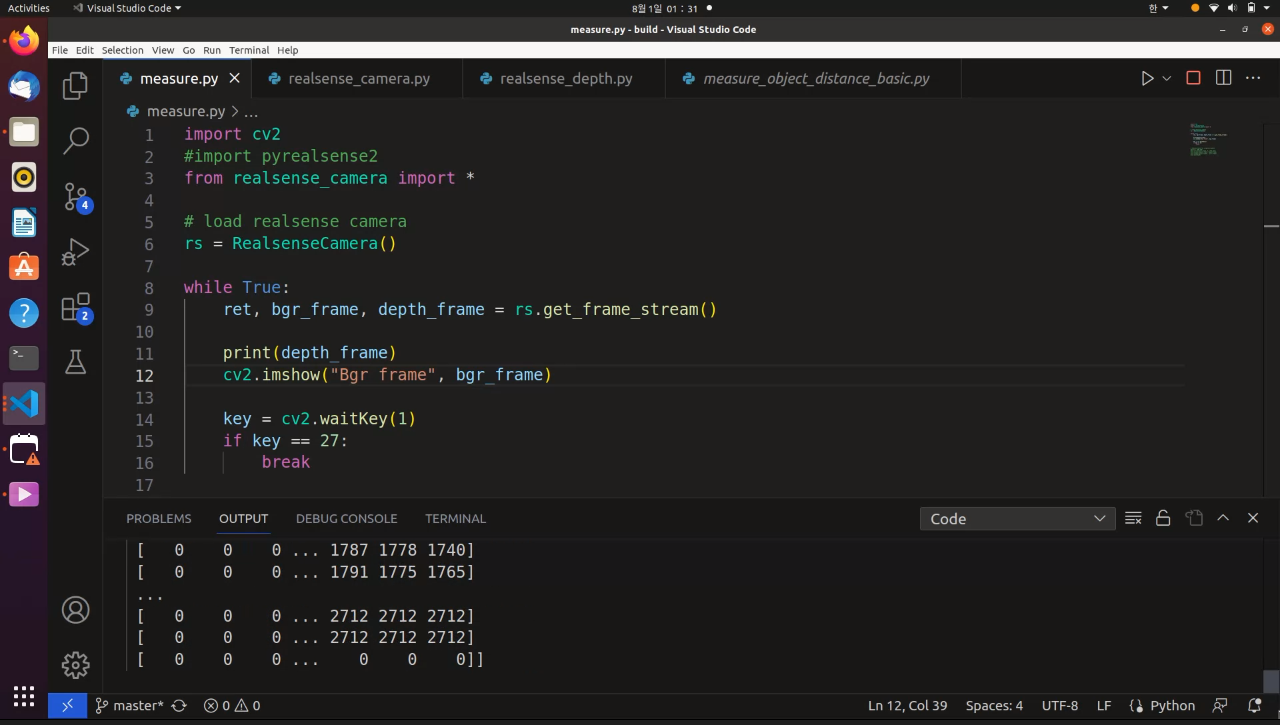
지도 생성시 뎁스 카메라(D435i)의 깊이 정보를 이용하였다. 주행시 물체 탐지를 위하여 뎁스카메라의 영상 정보를 YOLOv5의 코드를 사용하여 물체를 구분하였다.
구동 시스템의 경우 4개의 DC모터를 사용하였으며 제어의 경우 아두이노 -> 모터드라이버 -> 모터 순으로 연결된 상태로 PWM 제어방식으로 구동시켰으며 정밀제어를 위하여 PID 제어도 사용하였다.
경량화를 위하여 알루미늄 프로파일로 제작하였다.
4. 활용방안
본 제품을 사용함으로써 시각 장애학생들의 교내 이동 편의를 개선하여 캠퍼스의 장애 학생 복지 수준 향상시킬수있다.
전국 캠퍼스및 공공기관과 사업화를 추진하여 전국적으로 장애 학생 복지를 개선을 기대한다.
* 소개 슬라이드에서 보이지 않는 사진 첨부합니다.
소개 영상
소개 슬라이드
기타자료
비공개 자료입니다.
박수경 (인천대학교) 2023-08-06 23:51:07
업로드 확인했습니다.