
[NoA팀]V2V Smart Ambulance
- 전홍열
- 인하대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리정보, 전자, 전기, 기계
- 등록일2016-09-12
- 팀원(공동개발자)NoA
- 출품 경진대회2016 제8회 인하 종합설계 경진대회
- 0
- 0
- 578
상세설명
1. 수행배경
- 기술이 발달 함에 따라 경제적 이점, 편리성, 교통문제 해결능력 등 무인시스템이 유인 시스템에 비해 가지게 될 수많은 가능성과 그에 따른 필요성은 해가 거듭될 수록 부각 되고 있으며, 이제 자율 주행 스마트카는 선택이 아닌 필수라는 것을 알 수 있음 최근 스마트카의 연구가 활발 해 지면서 많은 프로토 타입 모델들이 제작되는 가운데 실생활에 투입될 실 모델은 일반 소비자 타겟의 상품보다 복지 및 대중교통에 먼저 투입될 가능성이 많아 지고 있음 , NoA 팀은 해가 거듭될 수록 문제가 되고 있는 응급차량 주행로 확보문제를 집중 조명해 프로젝트를 진행 하였음
2. 수행기간
- 2015.12 ~ 2016.02
프로젝트 주제구상 및 프로젝트 진행을 위한 팀별 역할, 전체 프로젝트 구조 세분화

- 2016. 02 ~ 2016.04
프로젝트 주제에 따른 세분화 된 시나리오 구상, 알고리즘 설계
프로젝트 진행 예산 확보
각 팀별 프로젝트에 필요한 기술 및 지식 습득
- 2016.04 ~ 2016.09
제작 차량 설계 및 구현
차량 ECU 회로 , 시스템 회로 설계 및 구현
Software 서버 구축, Line detecting, 등 프로그래밍 구현
시나리오 시스템 와선
3. 개발작품 설명
1. 시스템 구상도

자율주행 자동차 시대가 다가왔을 경우, 다양한 센서를 기반으로 자율주행 중인 차량과 구급차와의 통신(V2V)으로 도로에서 구급차의 주행 경로를 빠르게 확보하기 위한 system 설계를 목표로 함. 모듈 기반의 V2V기술이 아닌 Deep-learning을 통한 정확한 번호판 인식을 통한 고유ID 인식 및 데이터 송수신기반의 V2V 기술을 제안함. 구급차의 경우 Stereo Camera 기반의 자율주행을 수행하고, 일반 차량의 경우 Lidar와 Camera의 조합으로 자율주행을 함.
• 기계 및 차체 설계
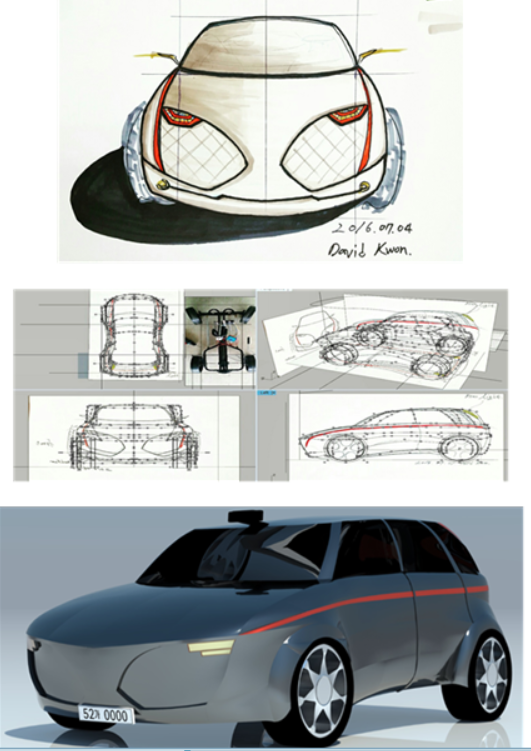
차량 외관과 샤시의 시안은 그림 2와 같음. 샤시는 알루미늄, 철골과 비교하면 강도가 약하여 충돌이나 큰 하중에 취약할 수 있으나, 이를 해결하기 위해 CAE 소프트웨어를 사용하여 정역학, 동역학 해석을 진행하여 이의 해석 결과를 바탕으로 적절한 위치에 중공 구조나 재료 보강 등을 실시하였음

<그림 > (좌) 차량 외관 디자인 시안. (우) 샤시 시안
• 소프트웨어 설계

구급차(car2)의 경우 Stereo Vision과 차선 인식을 통해 자율주행을 하고, 전방의 일정 거리에서 차량 발견 시 차량의 번호판을 인식하고, 그 번호판에 해당하는 차량에게 구급신호를 전방의 일반 차량에 전송함. 구급 신호를 수신한 차량(car1)은 차선을 기준으로 한쪽 면에 밀착하여 구급차에게 주행경로를 제공하고, 구급차가 지나치면 다시 차선 안으로 복귀하여 다시 주행을 시작함.
정확한 번호판 인식을 위한 문자 인식으로는 Convolutional Neural Network(CNN)을 사용함. 최근 이슈화 되었던 알파고에 사용된 Deep-learning 알고리즘 중의 하나인 CNN 기술을 번호판의 인식에 사용하고, 문자를 기준으로 labeling 후 컴퓨터 스스로 feature를 찾고, 결과 값에 따라 적절한 문자로 분류할 수 있도록 설계함.

구급차의 자율주행에서 Stereo Vision의 경우에는 그림 4와 같이 진행을 하며 실시간 구동을 위해 BM(Block Matching) algorithm(그림 4-(c))을 사용하고, Global Matching과 같은 dense disparity map을 위해 WLS filter를 함께 사용함(그림 4-(d)).
직관적으로 주행환경을 보여주고 데이터 연산량을 줄이기 위한 GOD(General Obstacle Detection) 기법으로써는 그림4-(e)와 같이 Top view와 같은 형태로 전방의 주행환경을 간단하게 표현하고, 그림4-(f)와 같이 Daimler 그룹 연구진에 의해 연구된 Stixels 기법을 기반으로 본 연구의 DB 환경에 맞도록 구축함.
최대한 적은 연산을 하면서도 높은 정밀도를 보이는 자율주행 system을 목표로 하고 있고, 과거에 진행해왔던 detection algorithm에 Deep-learning을 사용하여 장애물의 인식 & 분류를 하여 더욱 정확한 자율주행을 보장하려 함.
차량 안의 다양한 Device를 제어하는 환경을 구축하기 위한 효율적인 시스템을 구현함. 각 Device를 제어하는 프로그램(client)들 사이의 input/ouput 메시지 형식을 정의 및 전송을 책임지는 프로그램(server)을 구축하여 named pipe 기반의 multi threading 방식 server-client 모델을 사용함. 공유 자원에 대한 선점 문제를 해결하기 위해, 비동기식 입출력, 세마포어를 활용하여 여러 프로그램을 동시에 관리함.

(제작 응급 차량 렌더링)
4. 활용방안
-전세계 연간 교통사고 비용 5조 6000억달러( 약 6742조원)
- 자율주행 차량 시스템 도입 시 절감 비용 3000억 달러 (약 1565조원)
-자율주행차 보급률이 90%이상일 때 기대 효과 (2025년 예상)
1. 고속도로 사망률 50%감소
2. 다중추돌사고 65%이상 감소(약 5000억비용절감-교통약자 이동편의 제고 및 주차효율 향상
3. 기존 주차공간의 75%만으로 주차 문제 해결 가능
4. 통행시간->업무 및 여가시간 전환, 하루 평균 50분, 연간 12일의 여유시간 창출
5. 1400억 달러(약 168조원)의 경제유발효과
6. 교통량 감소로 인한 에너지 및 배출 가스 감소
- 응급환자 이송시간 단축
응급환자 이송시간 단축으로 인해 응급환자 소생가능성 증가
- 골든타임 시간확보
응급환자 이송시간 단축으로 인해 골든타임 시간 확보
소개 영상
소개 슬라이드
정보가 없습니다.