
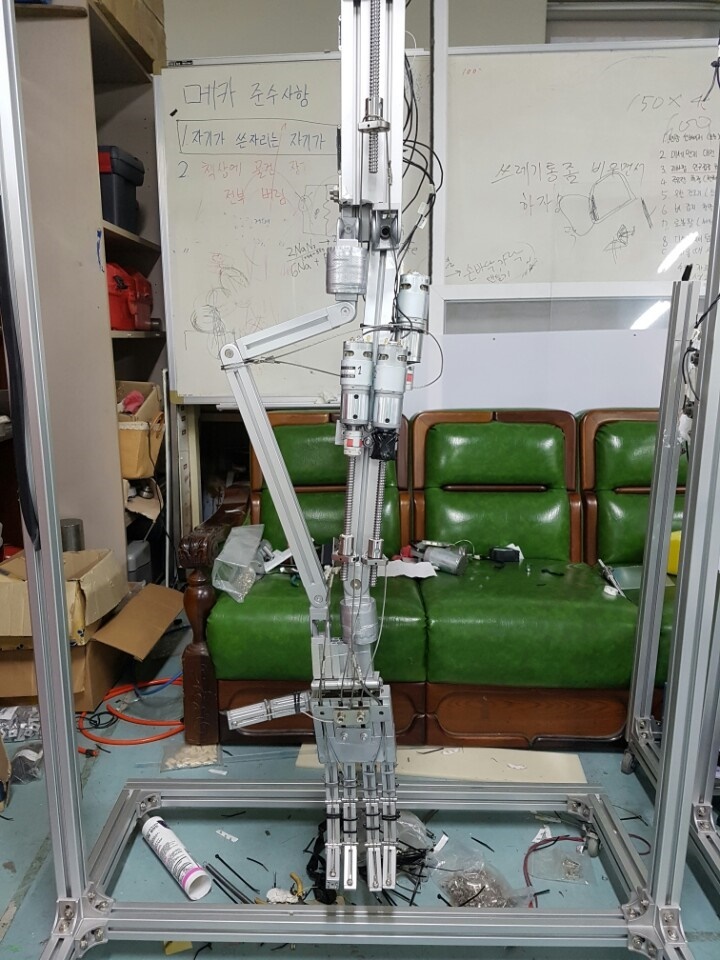
[I-MECA 1] 인공근육 로봇팔
- 이연주
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자, 기계, 의료
- 등록일2016-09-19
- 팀원(공동개발자)
- 출품 경진대회제12회(2016년) 인천대학교 창의적종합설계경진대회
- 0
- 0
- 1,205
상세설명
1. 수행배경
- 기존의 휴머노이드의 작동방식을 보다 더 인간화 시킨 움직임으로 구현하고자 이 작품을 제작하게 되었습니다.
2. 수행기간
- 약 6개월
3. 개발작품 설명
- 기존 로봇의 구동원리와 다르게 인간의 근육을 기계화하여 움직임을 구현
4. 활용방안
- 휴머노이드
소개 영상
소개 슬라이드
정보가 없습니다.