


[Hermes]플래투닝 시스템 프로토타입
- 성현기
- 인하대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자, 전기, 기계
- 등록일2017-07-28
- 팀원(공동개발자)민경규, 김진현, 배성현, 문성주, 한형진, 박대희, 이창혁, 김시현, 이힘찬, 최정은, 장우진, 박성준, 김광현, 하선우, 임정혁
- 출품 경진대회2017 제9회 인하 종합설계 경진대회
- 0
- 0
- 1,022
상세설명
1. 수행배경
자율주행 기술 중 하나인 플래투닝 시스템의 프로토타입을 구현하고자 한다. 플래투닝 시스템은 후발차량이 카메라, 센서, 통신을 이용해 선행 차량의 위치, 방향, 속도를 실시간으로 파악하여 자동으로 따라가는 시스템을 말한다. 여러 대의 차량들이 하나의 그룹을 이루며 군집주행하게 되므로 교통, 연비의 효율과 후발차량들의 자율주행이라는 이점을 갖고 있다.
2. 수행기간
2017년 3월에 영상처리, 제어, 통신, 차체설계, 딥러닝 5개의 팀을 구성했고 4월부터 프로젝트를 진행하고 있다.
3. 개발작품 설명
Hermes 팀은 플래투닝 시스템의 프로토타입을 구현하기 위해 Arduino, Raspberry Pi를 활용한 RC카를 제작할 것이다. 차선인식(Lane Detection), 차간거리유지(Adaptive Cruise Control), V2V(Vehicle-to-Vehicle)통신, 객체 추적(Object Tracking) 기술을 개발할 것이고 장애물이 있는 상황에서도 플래투닝 시스템을 유지할 수 있는 강인성을 보여주기 위해 장애물 회피(Obstacle Avoidance)기술도 추가할 것이다. 마지막으로 연비 효율을 위한 공기역학적 차체를 직접 설계하기 위해 UG-NX툴을 활용할 것이고 3D Printing을 통해 제작할 것이다.
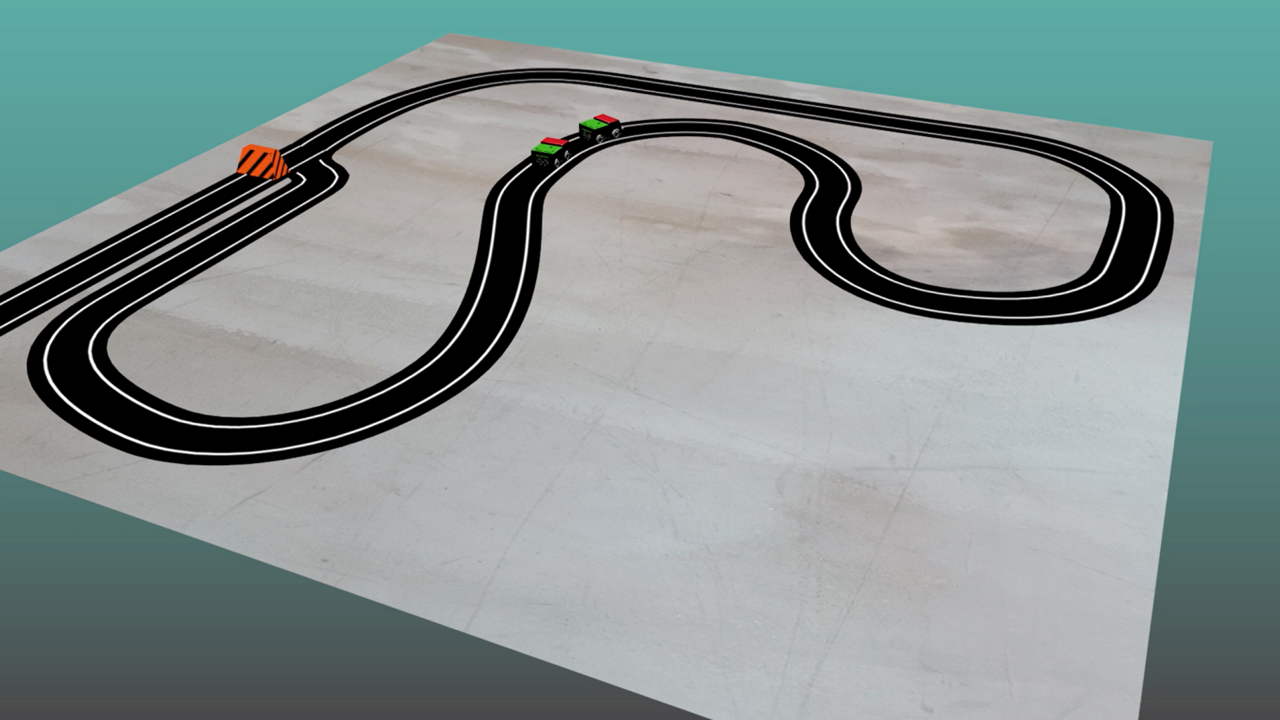
작품 구현을 위해 시나리오를 설정하였고 직접 제작한 도로 위에서 구현할 것이다.
1. Lane Detection : 선행 RC카의 라즈베리파이에 카메라를 연결하여 영상처리를 하도록 한다. 그리고 Pid Control을 이용하여 차선을 안정적으로 유지할 수 있도록 한다.
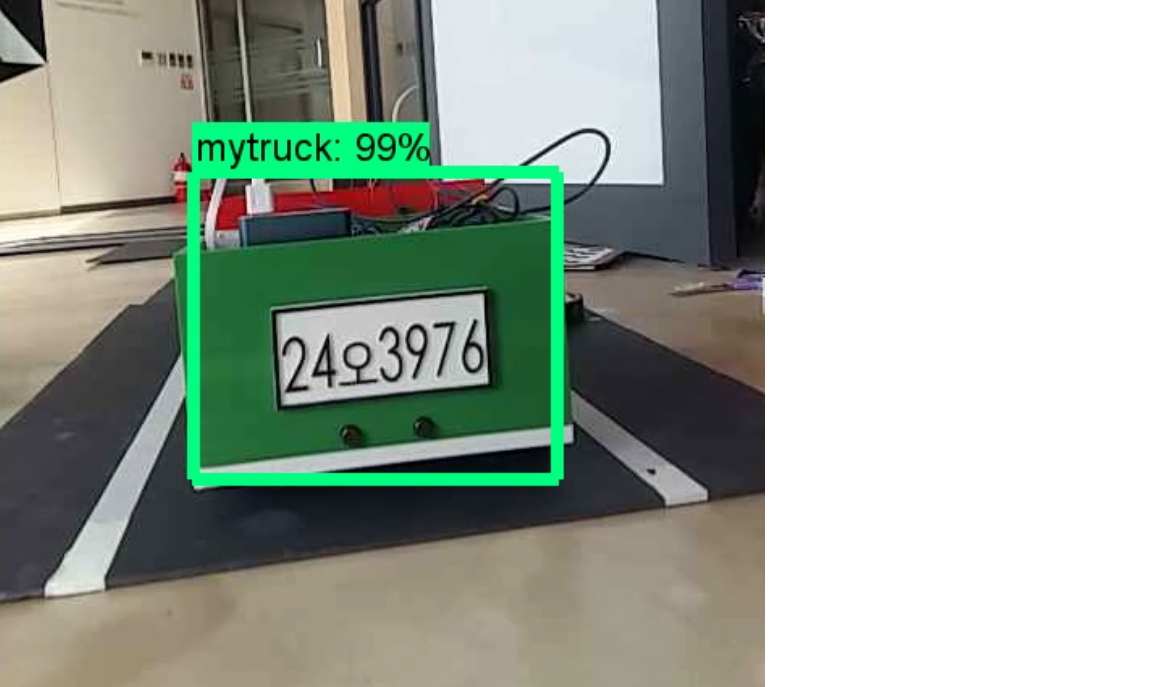
2. Car Tracking : 선행 RC카의 외형을 목표로 하는 데이터를 트레이닝하여 이를 추적(Tracking)할 수 있도록 한다.
3. Communication : 후발 RC카는 선행 RC카의 속도 정보를 V2V통신을 통해 전달받아 실시간 감/가속 및 정지/출발이 가능하도록 한다.
4. Cruise Control : 후발 RC카는 설정한 차간 거리를 유지하며 선행 RC카의 속도로 주행한다. Fuzzy Logic Control을 이용하여 구현하였다.
5. Obstacle Avoidance : 초음파센서를 이용하여 장애물을 인지하고 이를 회피할 수 있도록 한다.
6. Car Design : UG-NX 툴을 이용하여 차체를 설계하고 3D Printer로 출력하여 제작한다. 현재까지 선행 RC카의 차를 제작하였다.
4. 활용방안
자율주행차의 실현에 앞서 가장 중요한 것은 운전자의 안전이다. 따라서 실제 차량에 적용하기에 앞서 많은 테스트와 검증이 필요하다. Hermes의 프로토타입 제작은 플래투닝 시스템 개발을 위한 첫 단계라고 볼 수 있다.
먼저 플래투닝 시스템의 프로토타입을 제작할 것이고 정량적으로 분석할 것이다. 추후에는 좀더 큰 전동차에 LIDAR와 같은 고급 센서 및 컴퓨터를 탑재하여 성능을 높일 것이고 시스템과 운전자의 안전성을 분석할 것이다.
소개 영상
소개 슬라이드
정보가 없습니다.