
[알파카]To Develop Self Driving Test Bed System Using a Child Electric Automobile(유아용 전동카트를 이용하여 교육용 자율주행차 테스트베드 구현 )
- 최규진
- 인하대학교
- 작품구분일반형
- 공개여부공개
- 카테고리정보, 전자, 전기, 기계, 웹/앱
- 등록일2017-09-04
- 팀원(공동개발자)이정훈,임지웅,여성관,서영호,노웅,최진규,유성준,이성민,류진아,권범준,양수명,황현수,김병일,김남규,라인혁
- 출품 경진대회2017 제9회 인하 종합설계 경진대회
- 0
- 0
- 2,395
상세설명
1. 수행배경
·2025년 전 세계적으로 전기자동차 및 자율주행 시장이 본격적으로 열리며 그에 관련한 지식들을 접해볼 수 있는 대학용 교육 시스템이 필요하다.
·모터로 구동하는 유아용 전동차가 전기차량과 유사한 특성을 가지기 때문에 현재 알고리즘의 스케일만 키우게 된다면 미래에 주를 이루게 될 전기자동차에 적용이 가능하다.
·유아용 전동차를 구매하여 차량 설계 제작에 소요될 시간을 절약하며 자율주행 관련 모터제어, 센서융합, 차량통신에 더 많은 시간을 투자 할 수 있다.
·미래 자동차 기술에 대한 창의적인 아이디어를 자동차에 직접 적용해 볼 수 있는 기회가 될 것이다.
2. 수행기간
1단계(5월12일~7월15일)
2단계(7월15일 ~ 8월19일)
- 3단계(8월20일 ~ 9월15일)
3. 개발작품 설명
1단계(5월12일~7월15일)
아두이노 제어- 아두이노 코딩을 이용해 구입한 서보모터, DC모터의 성능을 테스트
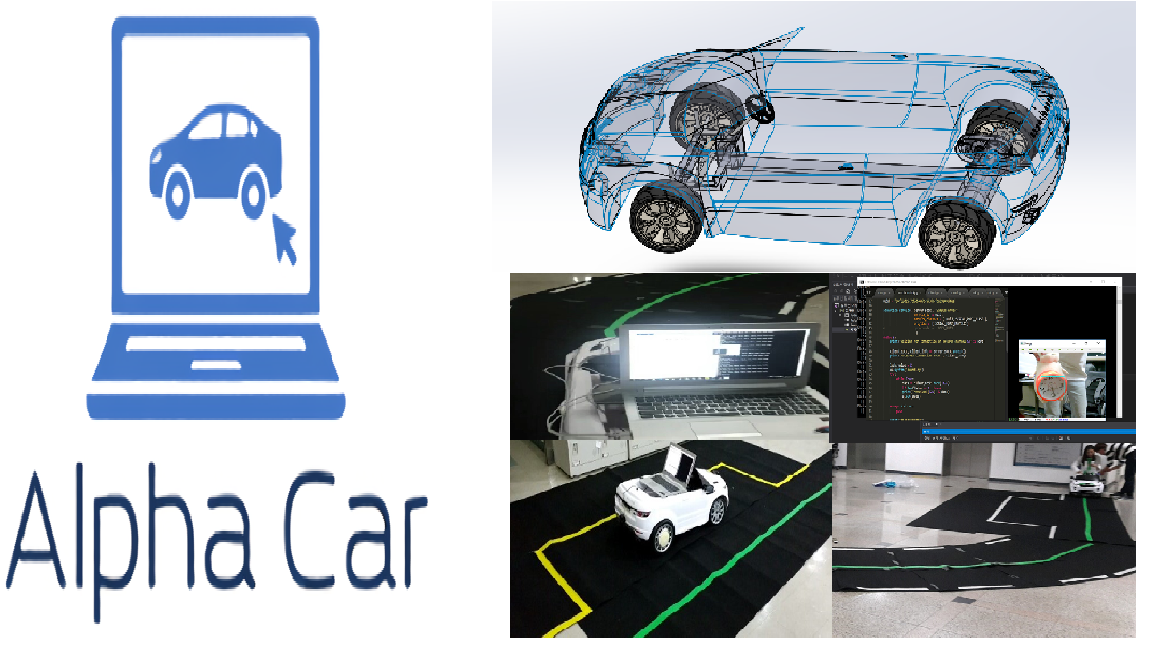
– 차량모델링- 시중에서 구입한 유아용 전동차 분해 후 조향장치, 구동부중심의 기계장치를 기계부에서 CAD파일로 변환한다.
전동차 개조 – 구입한 전동차를 개조하여 조향부분은 서보모터 구동부는 DC모터로 개조 한 후 구입한 컨트롤러에 맞게 호환시킨다.
– D/R 제작 - 시중에서 구입가능한 유아용 전동차를 구매하여 제어부(차량)에서 아두이노와 matlab/simulink연동을 통해 제어시스템 모델링 후 제어시스템 설계 및 해석 툴인 simulink를 통해 단순 코딩제어가 아닌 제어로직을 시각화 하여 제어시스템을 검증/ 조향 모터, 구동모터를 제어해 원하는 위치로 이동 가능하도록 제어한다.
2단계(7월15일 ~ 8월19일)
- 2단계 제어신호 flow -
( Matlab -> Simulink -> Matlab -> Arduino -> Motor )
* 프로세스 처리가 더디다는 단점이 존재
- 전자식 차동장치 - 전자식 차동기어를 구현해 조향각에 따른 두 바퀴의 회전수의 차이를 주어 조향 시 후륜의 미끌림을 방지하기 위한 전압 차동분배 시스템인 전자식 차동기어 구현
- Vision - Open CV를 이용, 도로 및 기타 주변의 환경들을 학습시킨다. 해당 학습을 통해 자율 주행 시 주어지는 여러 주변 환경 요소들을 인식하고, 특정 돌발 환경(라인이탈 등)에서 인식을 바탕으로 행동을 제어한다.
수동제어- simulink의 간단한 구조의 블록 다이어그램(Simulink)으로 제작한 제어시스템을 컨트롤러와 연동해 simulink의 Slider gain 값을 수동으로 조정함(조향각:-40~40도//순간속도:0~100)으로서 차량 성능 테스트 실현
– Motion Simulation(virtual) – 설계툴(NX)을 이용해 완성된 CAD파일을 통해 유아용 전동차의 움직임을 NX의 Simulation 기능과 simulink-CAD파일 연동(simscape 사용)을 통해 차량 Cad파일과 matlab-simulink 연동을 통해 가상환경 및 구속조건을 조정하여 actuator 의 값에 따른 차량의 움직임을 기구학적,동역학적 해석을 거쳐 가상환경에서 시뮬레이션 해본다.
3단계(8월20일 ~ 9월15일)
- 3단계 제어신호 flow –
1.Open CV -> phthon -> Matlab -> Simulink -> Matlab ->
Arduino -> Motor
(* 프로세스 처리가 더디다는 단점이 존재)
2.Open CV -> phthon -> Matlab -> Arduino -> Motor
(* 프로세스 처리향상 및 반응 시간 향상 에러 발생률 감소)
– Motion Simulation(real word) - 가상환경에서 실험한 데이터를 기반으로 벽지와 천 등으로 주행환경 및 라인 조성
– 자율주행(자동제어) - 7분할 방식으로 화면을 나누어 특정 색감을 가진 부분의 밀도를 비교하여 상황에 따라 차량을 조향 및 구동하여 라인트렉킹, selfparking 등의 미션 수행
– 기계학습을 이용한 사물인식 – 특정사물(가운데 시계 달린 인형)을 기계학습 방식으로 학습 시킨 후 특정 사물을 차량이 트레킹 하도록 제어시스템 구성 이를 발전시키면 사람이나 주변 사물을 일식하여 회피 및 정지 하는 자율주행 로직으로 발전시킬 수 있다.
– V2X(원격제어) – 차량과 블루투스통신이 가능한 스마트폰 앱을 제작함으로 차량의 상태를 모니터링함과 동시에 원격으로 제어가 가능한 시스템 구현(1.주행모드/2.주차모드/3.사물인식)
4. 활용방안
용이한 실험 – 실제 자동차의 주행테스트는 중요하나 이를 실제 적용 시키는 것은 매우 어렵다. 이를 스케일이 줄어든 유아용 카트에 적용 하여 시연 및 테스트가 수월해 질 것이다.
기본적인 플랫폼 – 이번 프로젝트가 성공적으로 진행된다면 이 알고리즘과 차량은 학생들에게 차와 가장 근접한 형태의 자율주행 플랫폼이 될 것이다.
유아용 전동차를 구매하여 차량 설계 제작에 소요될 시간을 절약하며 자율주행 관련 모터제어, 센서융합, 차량통신에 더 많은 시간을 투자 할 수 있다.
미래 자동차 기술에 대한 창의적인 아이디어를 자동차에 직접 적용해 볼 수 있는 기회가 될 것이다.
소개 영상
소개 슬라이드
정보가 없습니다.