
정보가 없습니다.
[NoA]V2X통신을 활용한 스마트 엠뷸런스
- 송인서
- 인하대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자, 기계, 의료
- 등록일2017-09-04
- 팀원(공동개발자)
- 출품 경진대회2017 제9회 인하 종합설계 경진대회
- 0
- 0
- 921
상세설명
1. 수행배경
- 4차 산업혁명의 대두로 데이터의 양, 영상의 처리 등을 활용한 무인 기술 시스템의 중요성이 강조되고 있음. 이러한 무인 기술의 집합체인 무인 자율 운행 스마트카가 세계적으로 각광 받고 있으며 여러 국가, 기업이 앞서 기술개발에 매진하고 있음.
- 첫 번째 목적은 기존의 차량 운행 체계는 운전자에게 많은 신체적 능력을
요구하여 장애인, 노인 등에게는 안전한 도로주행이 보장되지 않음. 이러한
계층에게 안전을 보장하기 위해 무인 자율 운행 시스템을 구현, 사회적 공익의
증대를 노림.
- 두 번째 목적은 Vehicle to Everything(이하 V2X), 차량과 서버 통신을 통해
선발차량이 가지고 있는 정보, 후발차량이 가지고 있는 정보를 서버를 통해
교환하여 시야가 확보되지 않은 상태에서도 사고를 감지, 예방하는 것임.
도로상에서 일어나는 충돌사고의 보편적 원인 중 하나인 전방사고 상황의 인식
불가능함을 해결해 줄 것으로 기대됨.
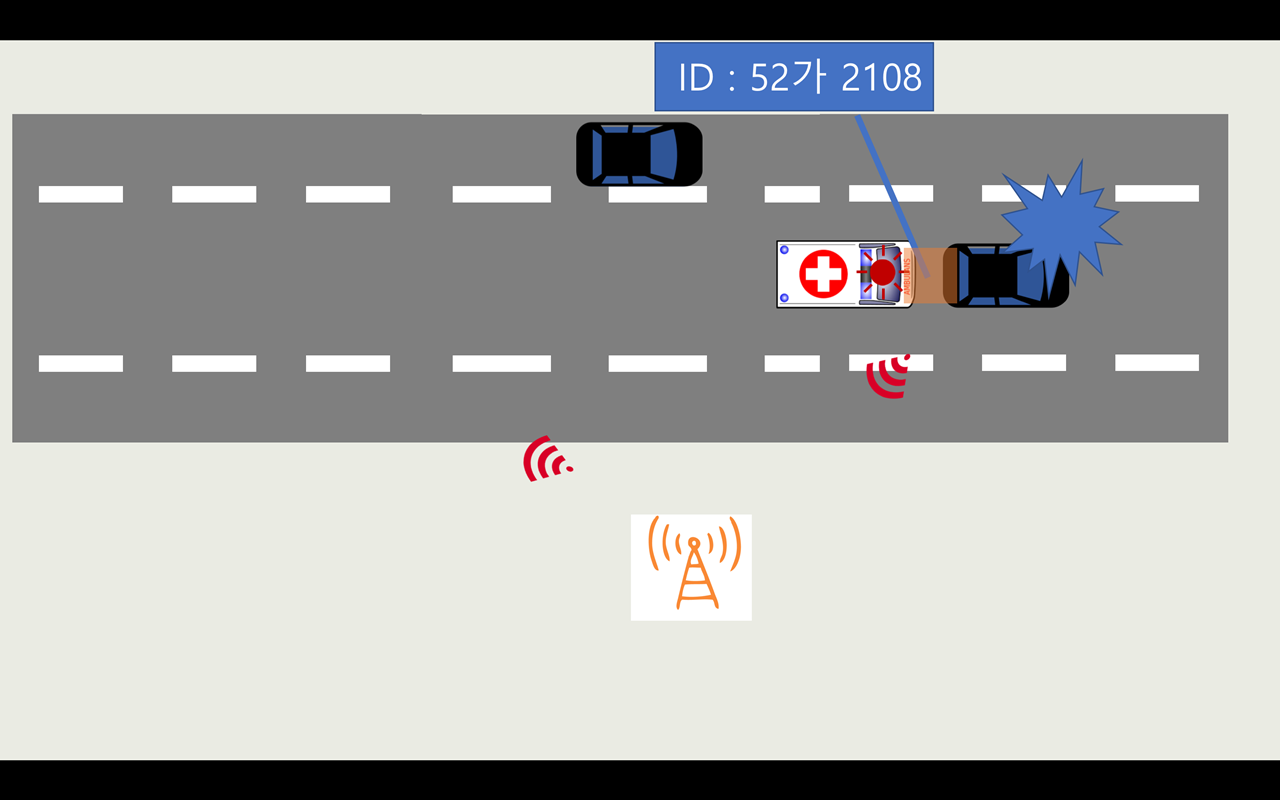
- 세 번째 목적은 노면 상 차량 응집도에 제한 받지 않는 응급주행 시스템(FEM)을
구축하는 것임. 기존의 유인 차량 시스템에서는 후방의 응급 차량을 감지하지
못하거나, 동시 다발적인 차량의 이동이 힘들기 때문에 발생하는 시간 지연으로
인해 환자의 생명에 큰 영향을 미치는 골든타임 확보의 어려움을 겪고 있음.
이러한 종래의 문제점을 응급차가 V2X를 통해 전방위에 존재하는 타 차량들에게
신호를 전달하고, 상기 차량들은 상기 신호를 기반으로 하여 동시다발적으로
신속하게 노면상의 여유 공간으로 이동하게 됨. 이를 통해 응급차량의 주행로가
확보되고 신속한 응급 수송 및 후송을 할 수 있는 응급 주행 시스템(FEM)을 구
축할 수 있음.
2. 수행기간
- 상세설명...
3. 개발작품 설명
- 현재 자율주행 기술에서 주로 사용되는 센서인 Lidar와 Stereo
Camera를 사용하는 자동차를 직접 설계 후, 각 차량이 V2X 기술을 통해 서로의
주행 환경을 실시간 공유하여 더욱 안전한 주행을 보장하는 것을 목표로 함.
- 카메라를 통하여 차량의 고유한 번호판을 인식 후 그에 해당하는 차량으로 메시
지를 전달 및 수신함으로써 V2X 통신을 구성하고, 번호판 인식의 경우 Deep
-learning을 활용하여 보다 정확한 인식률과 실시간의 원활한 통신을 목표로 함.
- 자율주행 자동차에 대한 각 기업들의 독자적인 시스템이 있고, 주된 사용 센서 또한 각기 다름.(ex. Google - Lidar+camera, Daimler – Stereo Camera) 이러한 행보를 기준으로 앞으로의 자율주행 자동차 시대에 서로 다른 센서들로 이루어 진 자동차 간의 communication은 필수가 될 것이고, 본 연구에서는 각각 다른 센서(Lidar, Camera)를 달고 있는 차량(응급차, 일반 차량) 간의 원활한 통신을 보여주는 것을 목표로 함.
- 모든 차량이 중앙 서버와 연결된 상황을 가정해서 사고 차량에서 자동으로
서버로 구조 요청 신호를 보내고, 119등 구조 기관에 자동으로 구조 요청이
전송됨. 이후 사고 발생 지점까지 엠뷸런스가 자율 주행을 통해 사고 발생
지점으로 주행하고 이후 상황을 자동으로 서버로 전송해서 중앙 기관에서 실시간
통제가 가능하도록 함.
4. 활용방안
- 완전 자율 주행이 실현되면 현재의 ambulance를 대체함.
소개 영상
소개 슬라이드
https://www.slideshare.net/secret/2VsSftTcR8jhy0