
[A-3]근전도(EMG)기반 촉감 인지 로봇팔 시스템 개발
- 박승섭
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리의료, 생활
- 등록일2017-09-11
- 팀원(공동개발자)권대우, 안석현
- 출품 경진대회제13회 인천대학교 창의적종합설계경진대회
- 0
- 0
- 940
상세설명
1. 수행배경
- 원격 조종 로봇 산업이 최근 점차 성장하는 중에 로봇제어 시 시각에만 의존하여 조종해야 하는 문제가 존재함.
- 정교한 로봇제어를 위해서는 사용자가 알 수 있는 촉감 피드백이 필요하나 아직 매우 초기 연구단계로 많은 개발이 필요함.
- 로봇팔을 이용하여 깨지기 쉬운 물건을 파지할 때, 피드백을 통해 너무 강하게 잡아서 깨지거나 느슨하게 잡아서 떨어뜨릴 수 있는 상황을 피할 수 있음.
2. 수행기간
-
구분
추진내용
프로젝트 기간
6월
7월
8월
9월
계획
프로젝트 수행 계획 및 개념 설계
분석
기능 분석
설계
H/W 설계
구동 알고리즘 및 시스템 구상도 설계
개발
로봇팔(Robot Arm) 구동 S/W 개발
신호 처리 및 Haptic Actuator 동작 구현
테스트
최종 테스트 및 오류 분석
종료
개발 종료 및 최종 보고서 작성
3. 개발작품 설명
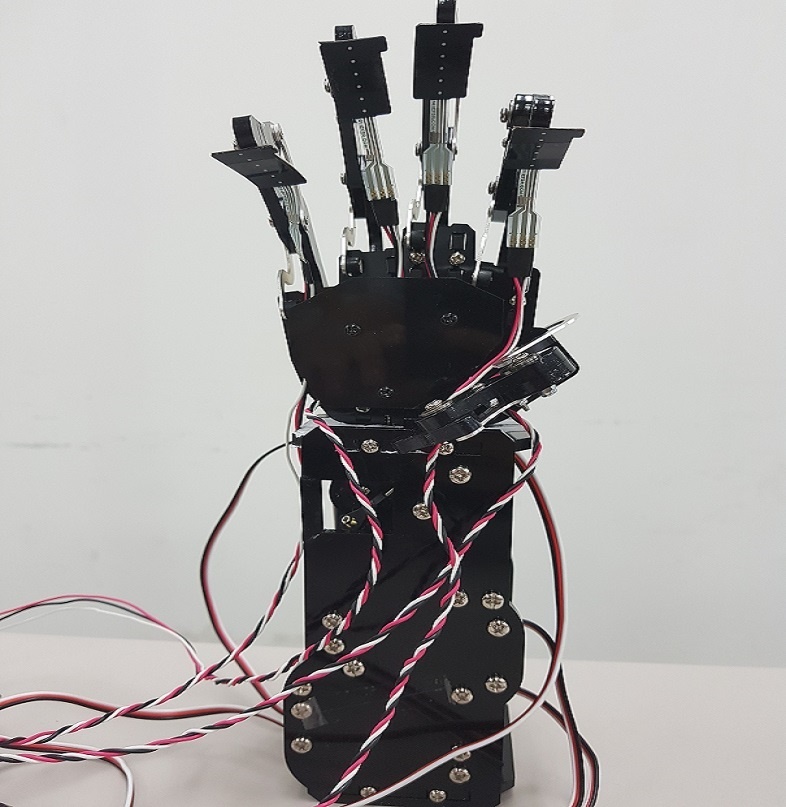
- 로봇팔 제어 : 사용자의 팔 하박 부위에서 측정된 근전도 신호를 처리하는 과정을 거쳐 원격으로 로봇손을 쥐고 펴는 동작을 제어 할 수 있음.
- 근전도 센싱 : 팔에 부착된 근전도(EMG) 센서에서 팔 움직임(이완, 수축)에 따른 근전도 신호를 측정한 후 MCU에서 AD 변환기에 의해 디지털 신호로 변환함.
- 촉감 신호 센싱 : 로봇팔에 부착된 압력센서에서 로봇 손가락으로 물체를 잡을 때 감지되는 압력 신호를 측정한 후 MCU에서 AD 변환기에 의해 디지털 신호로 변환함.
- 촉감 피드백 : 로봇손에 가해지는 외부 자극신호를 촉감 피드백을 통해 사용자에게 전달해줌으로써 원활한 제어가 가능하도록 함.
- 무선 데이터 송수신부 : 블루투스 모듈을 이용하여 무선통신을 하는 모듈로 로봇팔 제어신호를 로봇팔에 전송하고 로봇팔의 압력 신호를 전송함.
4. 활용방안
- 의료 분야 : 원격으로 로봇을 통한 정교한 수술이 가능하고 실제 팔이나 다리와 같은 의수 및 의족 등을 제공할 수 있음.
- 안전 분야 : 사람이 작업하기 힘들거나 위험한 공간에서 촉감 피드백 조종 로봇을 통해 정밀한 작업이 가능함.
- 촉감 피드백이 적용되지 않은 기존 로봇보다 안전하고 섬세하게 작업을 진행할 수 있음.
소개 영상
소개 슬라이드
정보가 없습니다.