
정보가 없습니다.
영상처리기반의 고속 자율 주행 RC카
- 장재형
- 인천대학교
- 작품구분일반형
- 공개여부공개
- 카테고리웹/앱
- 등록일2015-09-24
- 팀원(공동개발자)
- 출품 경진대회미신청
- 0
- 0
- 3,223
상세설명
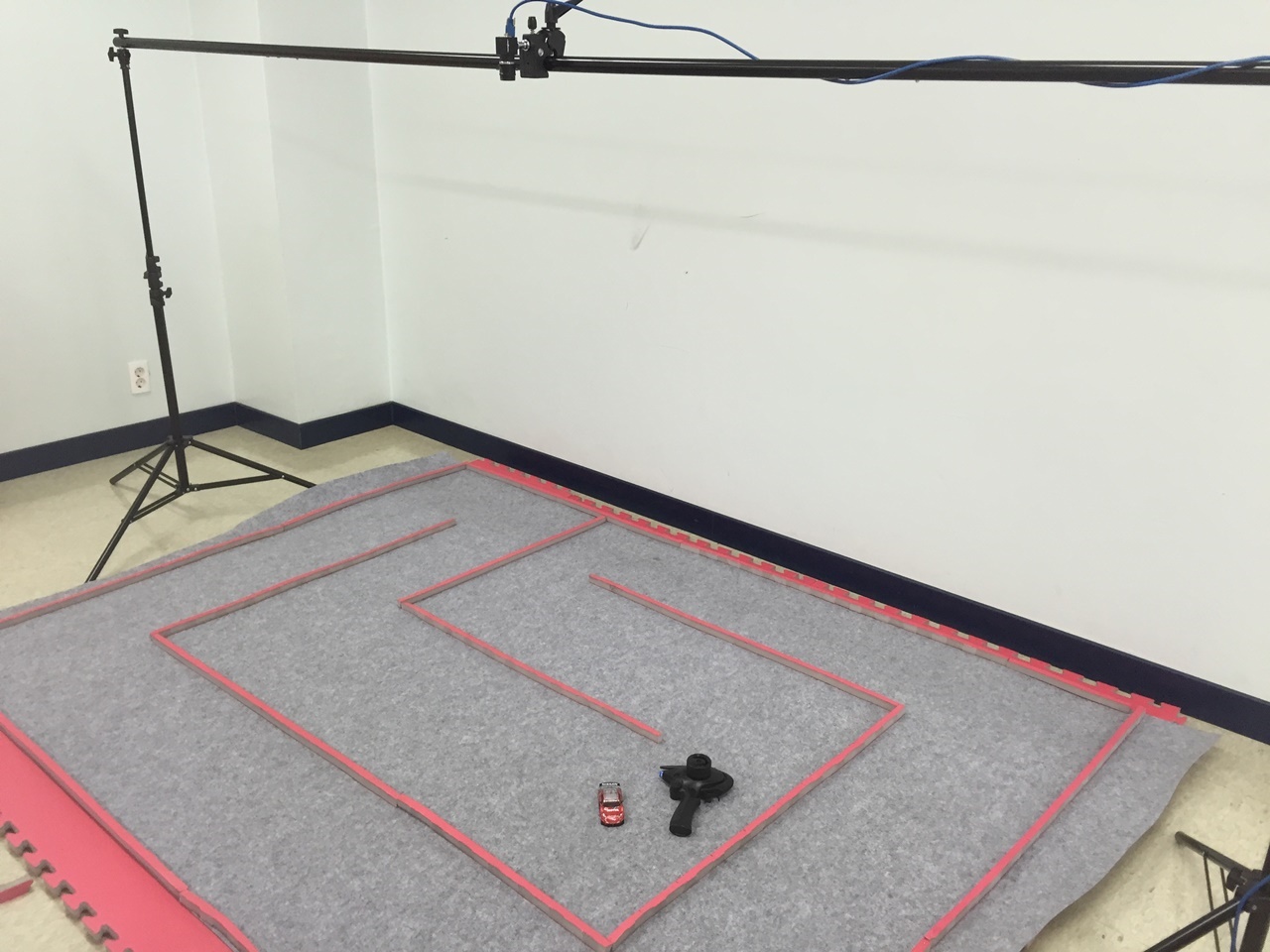
- 하드웨어
USB카메라를 통해 PC에서 영상을 획득
PC와 연결된 아두이노에 RC송신기를 연결
획든된 영상을 영상처리하여 시리얼 통신으로 송신기에 전달하여 RC카로 값이 전달된다.
- 진행 흐름
카메라를 통해 들어온 트랙의 특정 패턴을 파악하여 주행할 경로를 생성한다.
다음으로, 현재 RC카의 위치를 확인하기 위하여 적외선 필터를 단 카메라로 RC카에서 나오는 적외선 빛을 확인한다.
이를 통해 확인된 위치를 통해 경로와의 각도를 에러신호로 잡아. PID제어를 통해 에러신호를 0으로 만들도록 자율 주행한다.
- 소프트웨어
영상처리를 위해 Visual Studio 2012에서 openCV 2.4.9버전을 사용하였다.
아두이노 DUE의 DAC포트를 이용하여 RC송신기를 제어한다.
소개 영상
소개 슬라이드
정보가 없습니다.