
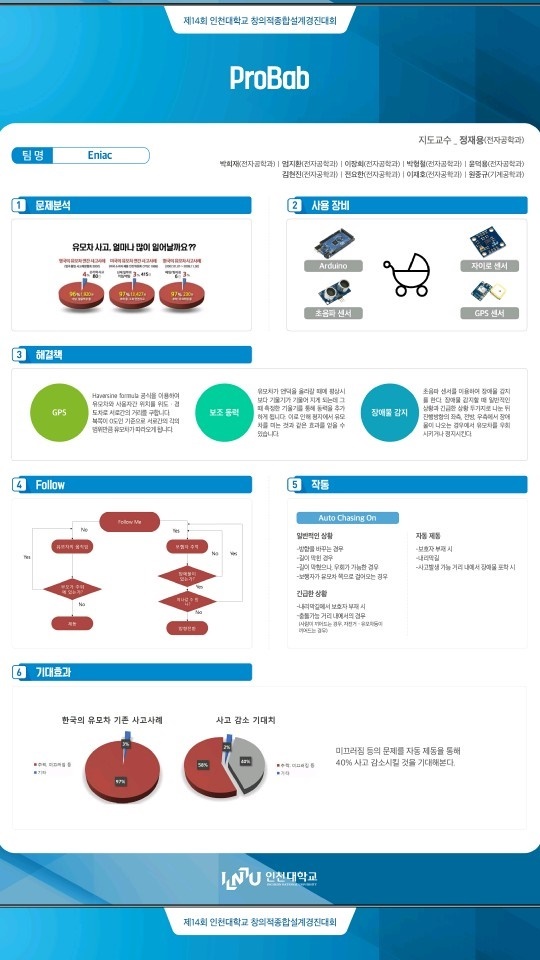
[A-19] Probab
- 박희재
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자, 전기, 기계, 생활
- 등록일2018-09-10
- 팀원(공동개발자)eniac
- 출품 경진대회제14회 인천대학교 창의적종합설계경진대회
- 0
- 0
- 1,077
상세설명

1. 수행배경
- 작년 큰 화재를 모았던 유모차 사고 뉴스를 다들 한 번 쯤 보셨을 것이라 생각합니다. 경사길에서 유모차를 놓쳐 아이가 다치게 된 사건 입니다. 4차 산업 혁명이 화두인 요즘 우리는 생활 반경의 여러 물건에 '스마트' 기능을 추가하여 사용하고 있습니다. 그런데 정작 안전이 최 우선으로 수반되어야 하는 유모차는 최근 4차 산업 혁명의 동향과 부합하지 않는다 생각하였습니다. 이에 따라 불행한 사고를 예방 하고, 편리한 육아를 위해 오토체이싱, 장애물 회피 그리고 급제동 기능을 유모차에 추가한 새로운 유모차를 고안하게 되었습니다
2. 수행기간
•6월 - 아이디어 회의
•7월 - 주제 선정 및 작동 알고리즘 구상, 부품 조사 및 구매
•8월 - 아두이노를 통한 모토 제어, 초음파센서를 부착한 아두이노 간 통신, 초음파 센서 값에 따른 알고리즘 구현(소프트웨어)
유모차 바퀴 모터 부착 및 프레임 초음파센서 부착(하드웨어)
•9월 - 작품 점검 및 정확도 증진을 위한 실험
3. 개발작품 설명
•아두이노와 모터 드라이브를 통해 DC모터를 제어 합니다.
•전면에 부착된 초음파 센서를 통해 돌발 상황 발생시 모터가 정지하여 유모차가 정차하게 되고, 옆면에 부착된 초음파 센서에 수신되는 값을 통해 사물 회피 가 진행됩니다
•사용자의 compass 와 유모차의 compass 값을 수신하여 방향전환이 이루어 집니다.
•후면에 부착된 초음파 센서를 통해 일정 거리 이내에 있을시 유모차가 직진하며 범위 외의 거리가 수신되면 유모차가 정차합니다.
4. 활용방안
•주된 기능인 오토 체이싱 기능을 이용하여 편리한 운행이 가능하며, 유모차와 사람의 거리를 측정하기 때문에 사람과 일정거리가 떨어졌을 경우 유모차가 정차하므로 안전성 면에서도 안전합니다. 또한 간혹 발생하는 돌발 상황에 대비하여 급제동 기능이 있어 돌발 사고에 대처 할 수 있습니다. 마지막으로 방향 전환과 장애물 회피가 가능하기에 이용자의 자율성이 기존 유모차에 비해 월등할 것 입니다.
소개 영상
소개 슬라이드
정보가 없습니다.