
정보가 없습니다.
영상처리를 이용한 실시간 객체인식 및 자동추적비행 솔루션 개발
- 김은서
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자, 기계
- 등록일2018-11-21
- 팀원(공동개발자)임지혜,이수아
- 출품 경진대회2018년 -2학기 산학 캡스톤디자인 경진대회(학생팀 & 멘토 모집)
- 0
- 1
- 941
상세설명
1. 수행배경
- 무인항공기의 자율 주행에 있어 GPS를 사용하는 방식은 비행경로가 명확하나 제한된 경로로 인해 실제 활용성이 낮은 단점을 갖는다. 그러나 카메라가 장착된 무인항공기의 영상 기반 자율 비행의 경우 궤적 추종 어플리케이션에 따라 다양하게 활용할 수 있다. 산학 캡스톤디자인의 연구 수행으로 멀티로터 무인항공기의 자동 추종 시스템을 위해 아르코 마커를 표적으로 선정하고 마커인식시스템 및 속도 명령 기반 표적 추종 시스템을 설계하였다.
- GPS를 기반의 경로 비행은 고정된 경로를 비행하지만 영상 기반의 경로 추종 비행은 영상처리 어플리케이션에 따라 다양하게 활용할 수 있는 장점이 있으며 최근 오픈 HW/SW 기반의 멀티로터가 많이 공개되었으나 무인항공기로 다양하게 활용하기 위해 영상 기반으로 경로를 추종하되 기존 자세제어기에 입력으로 사용되는 속도 명령을 PID 제어기로 발생시키는 연구가 필요하다
- 현재 항공촬영용 드론이나 산업용 드론의 경우 GPS,영상처리 기반 자동비행시스템이 탑재되어 상용화 단계에 있지만 상품용도에 따라 제한적으로 사용이 가능하거나 개발자용 SDK를 제공하는 경우에도 특정 제품을 사용해야만 하는 제약이 있다. 실시간 영상처리를 이용한 객체 인식 및 자동비행제어에 대한 연구를 진행하고 핵심기술을 확보함으로써 상황이나 용도에 따라 다양한 크기나 모양의 드론 제작이 가능하다.
2. 수행기간
추진일정표 | 일련번호 | 주요내용 | 추진일정 | 비고 | |||||
10월 1-2주 | 10월 3-4주 | 11월 1주 | 11월 2주 | 11월 3주 | 11월 4주 | ||||
1 | 문헌조사 및 드론부품조사 | | | | | | |
| |
2 | 연구용 드론 자체 제작 | | | | | | | | |
3 | 마커 인식 프로그램 개발 | | | | | | | | |
4 | PID 드론 제어 프로그램 개발 | | | | | | | | |
5 | 프로그램 드론 탑재 및 테스트 | | | | | | | | |
6 | PID계수 튜닝 및 프로그램 안정화 | | | | | | | | |
7 | 통합 시스템 정합 | | | | | | | | |
8 | 시스템 테스트 및 성능개선 | | | | | | | | |
3. 개발작품 설명



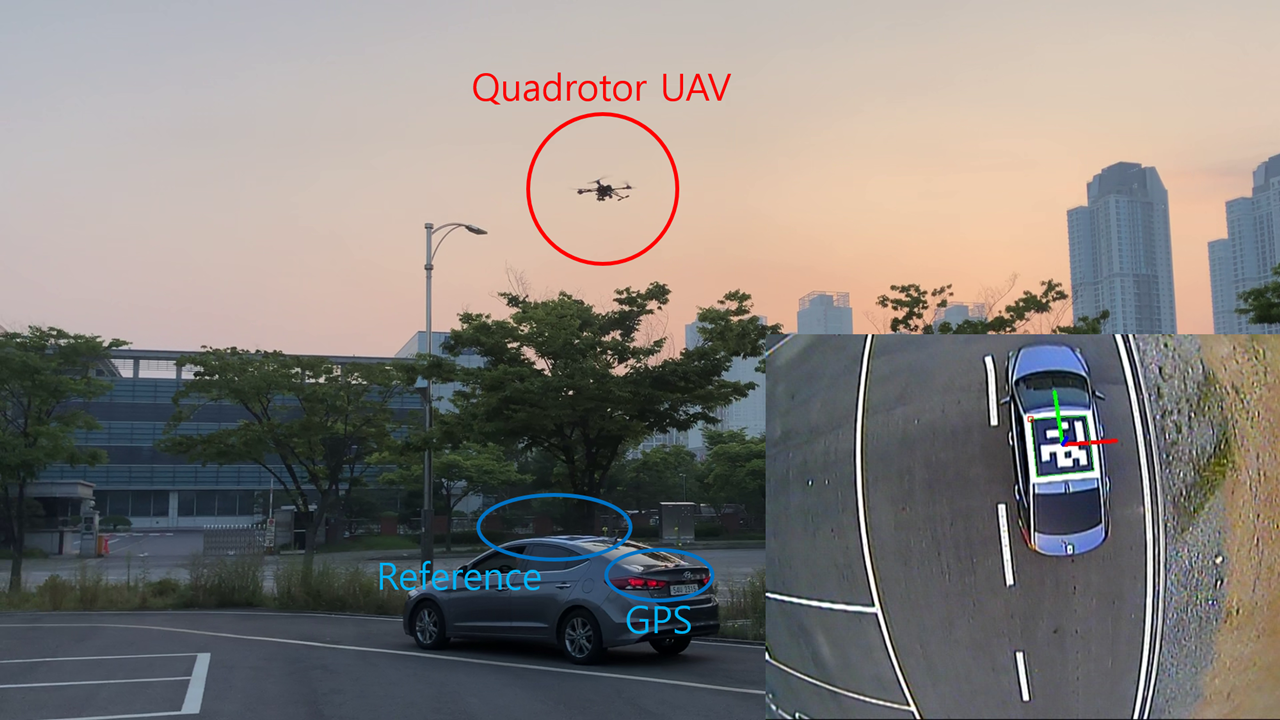
- 산학 캡스톤디자인 연구에서 제안하는 표적 추종 시스템은 쿼드로터 무인기에 장착된 카메라 영상 기반 마커인식 시스템과 지상 이동 표적과 쿼드로터 무인기의 상대위치를 이용한 속도 명령 제어 시스템으로 구성된다.
- 멀티로터 무인항공기의 자동 추종 시스템을 위해 아르코 마커를 표적으로 선정하고 마커인식시스템 및 속도 명령 기반 표적 추종 시스템을 설계하였다. 차량위의 마커를 표적으로한 자동 추종 실험결과 구현된 쿼드로터 무인기는 GPS 오차, 외란 등의 외부 요인에도 강건한 비행성능을 보였다.
4. 활용방안
영상 기반의 자율비행은 GPS기반 지정경로 비행을 대체하여 영상어플리케이션에 따라 산업,건설 등 다양한 현장에서 사용이 가능하므로 그 활용성이 매우 높다.
-
상용화 및 산업현장의 애로기술 해소를 위해 산학 캡스톤디자인의 결과물에 대해 후속 연구를 진행하여
기술 사용화 및 사업화 계획에 있다.
소개 영상
소개 슬라이드
정보가 없습니다.
김은서 (인천대학교) 2018-11-21 15:38:19
최종 결과보고서는 기타자료에 첨부 하였습니당!
2달 동안 산학 캡스톤디자인을 수행하면서
공부에 도움이 많이 되었습니다 화이팅