
재활운동 대상자를 위한 보행보조기 개선
- 임창규
- 인하대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전기, 의료, 기타
- 등록일2019-07-31
- 팀원(공동개발자)김종헌, 임효주, 김선우
- 출품 경진대회제11회 인하종합설계경진대회
- 0
- 0
- 961
상세설명
1. 수행배경
1) 계단에서 보행보조기 이용이 가능하면 이용거리를 크게 줄일 수 있음에도 불구하고 경사도가 낮은 경사면을 이동하면서 불필요하게 이동거리가 크게 증가하는 문제점이 발생함.
2) 내리막길을 내려올 때 브레이크를 놔버리면 속도가 너무 나서 끌려 다닐 수 있으면서도 재활치료를 하는 어르신들의 경우 경사면을 내려올 때 보행보조기의 속도를 늦추기 위해 브레이크를 잡으면서 내려오시는데, 오랫동안 브레이크를 잡고 있으면 팔목이 욱신거리는 문제점이 있음.
3) 보행보조기가 경사면을 보행할 때 오르막 경사로에서 뒤로 밀리고 내리막 경사로에서 앞으로 밀리는 현상이 발생하여 안전성이 확보되지 않으면 부상을 입을 우려가 있음.
4) 기존 보행보조기의 경우 평평한 곳을 이동할 때 사용하기 때문에, 계단을 오르거나 내려오는 등의 사용되는 근육을 활성화시키거나 재활하는 것이 어렵다는 단점이 있음.
경사면에서 발생하는 주요한 4가지 문제점을 해결하기 위해 본 연구를 수행하게 되었음.
2. 수행기간
- 수행기간 2019.6.21 ~
- 다학년프로젝트로 계속 F/B을 통하여 제품을 개선할 예정
3. 개발작품 설명
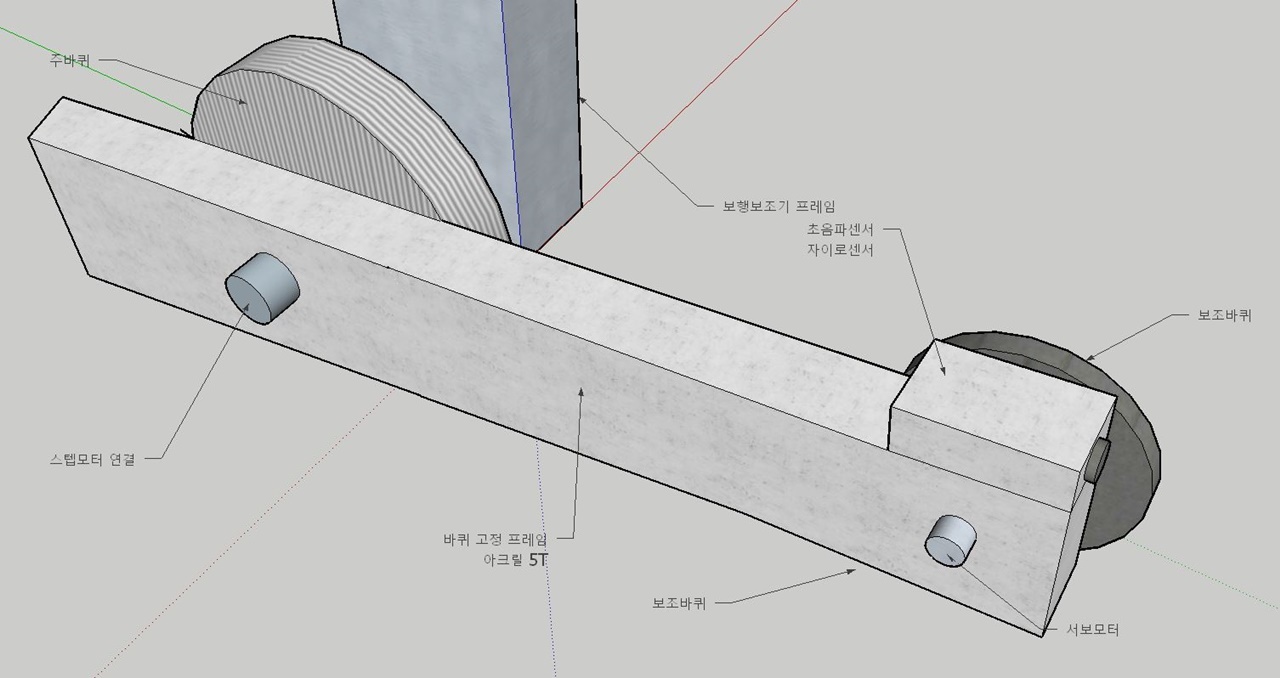
• 서보모터와 스텝모터를 제어하여 경사면에서 용이하게 이동할 수 있게 한다.
• MPU 6050 (6축 자이로 센서)를 통해 경사면에서 경사도를 측정하여 아두이노의 시리얼 통신을 통해 측정값을 받는다.
• 측정된 경사도 값에 따라 스텝모터가 작동하여 연결되어 있는 프레임이 계단 혹은 경사면에 걸쳐 있게 되어 무게를 분산시키고, 서보모터를 작동시켜 경사면 내리막길에서 보행속도를 늦추는 것으로 안전하게 이동할 수 있도록 돕는다.
• 보행자의 속도가 너무 빨라지거나 느려지면 서보 모터를 제어하여 보행자의 이동을 돕는다.
4. 활용방안
• 기존 보행보조기구의 경우 평면만 이동한 거에 반해 본 프로젝트의 보행보조기구는 경사면 및 계단을 이동함으로 보행자의 활동 반경을 넓히고, 기존 근육이 아닌 안 쓰던 근육을 활성화 시켜 재활기간을 단축시킬 수 있을 것이라 봄.
• 서보모터 및 스텝모터를 이용하여 보행자의 속도나 경사면에서 보행할 때 도움을 주어 기존 내리막길을 갈 때 어르신들의 경우 장기간 동안 브레이크를 잡아 손목이 저리는 일이 있는데 이를 해소할 수 있을 것이라 봄.
• 기존 보행보조기구에 비해 보행안정성이 높고, 아두이노를 통해 저가로 제작하면서 보급이 쉬울 것이라 판단함.
• 추후 제품의 실용성을 확인하고자 인하대병원과 협의하여 실제 이용이 가능한지 분석해볼 예정임.
소개 영상
소개 슬라이드
정보가 없습니다.