
재난현장 정보전달용 정찰로봇
- 신정열
- 인하대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리정보, 전자, 전기, 기계
- 등록일2019-08-03
- 팀원(공동개발자)
- 출품 경진대회제11회 인하종합설계경진대회
- 0
- 0
- 895
상세설명
1. 수행배경
- 지진이나 화재와 같은 재난상황에서 건물안의 지형에는 많은 변화가 생길 수있다. 갑작스러운 장애물이 있을수도 화재가 난 구역도 있을 수있다. 그런 상황에서 구조대원이 생존자를 위해 재난현장으로 뛰어드는것은 더 큰 인명피해를 야기할 수있다. 최근 우리나라에서 일어난 많은 재난으로 인한 피해 소식을 들으며 이러한 문제를 해결하는 로봇을 제작하고자 하는 동기가 생겼다.
2. 수행기간
- 6월 ~ 7월초: 하드웨어 제작
- 7월초 ~ 7월말: 모터제어
- 7월말 ~ 8월 중순: 라이다를 통한 slam , 카메라를 이용한 얼굴인식
- 8월 중순 ~ 8월말: 코드의 통합작업, 오류점검
3. 개발작품 설명
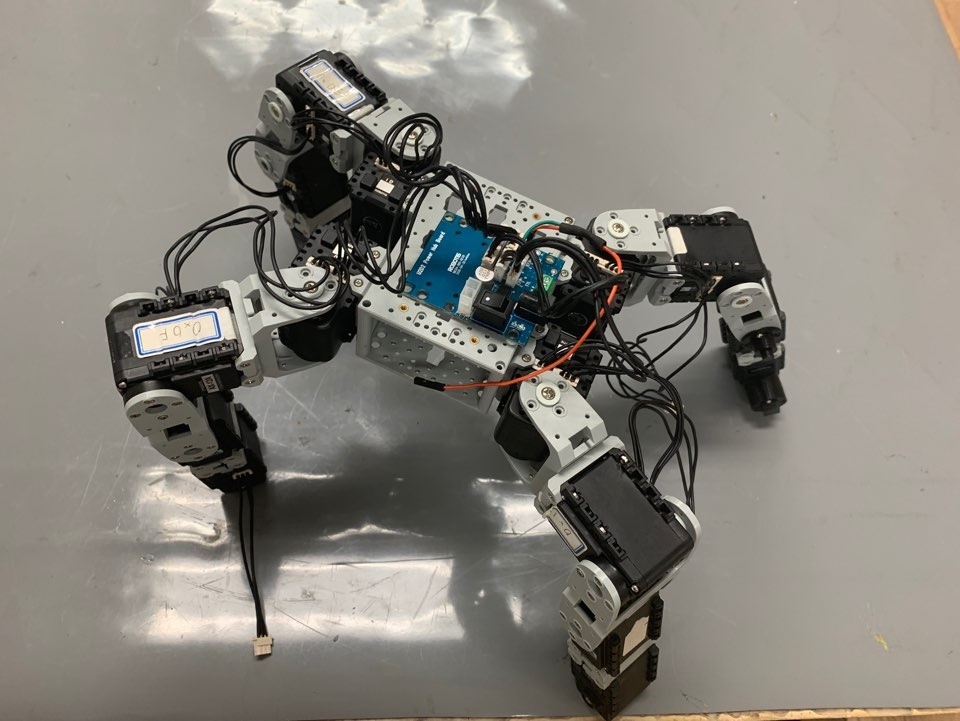
- 하드웨어, 모터:4족 로봇에 추가적으로 무한궤도를 접합하기 위해 3D프린터를 이용하여 하드웨어를 제작하였다. 아두이노를 이용하여 모터제어를 함으로써 4족보행과 무한궤도를 이용한 주행이 가능하다.
- 카메라: google vision api 를 이용하여 로봇에 내장된 카메라에 찍힌 모습이 생존자인지 장애물인지를 판단하여 생존자에 관한 정보를 제공한다.
- 라이다: slam 기능을 구현하여 현장의 2D맵을 구현한다. 카메라에서 얻은 생존자의 정보를 토대로 생존자의 위치 또한 2D맵에 작성한다.
4. 활용방안
- 사람임을 인식하는 카메라와 사물사이의 거리를 파악하고 2D맵 구현이 가능한 라이다를 이용하여 재난 현장뿐아니라 전장에서도 활용이 가능하다.
소개 영상
소개 슬라이드
정보가 없습니다.