
[A-10] Rectangle - 향상된 SLAM 기능을 가진 특정 개체 추적 로봇
- 김기식
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리전자
- 등록일2019-09-11
- 팀원(공동개발자)이정훈, 정영빈, 김기식, 이승현, 동홍석, 김상훈, 권혁준
- 출품 경진대회제15회 인천대학교 창의적종합설계경진대회 참가팀 모집
- 2
- 0
- 1,286
상세설명
1. 수행배경
- 제안 배경
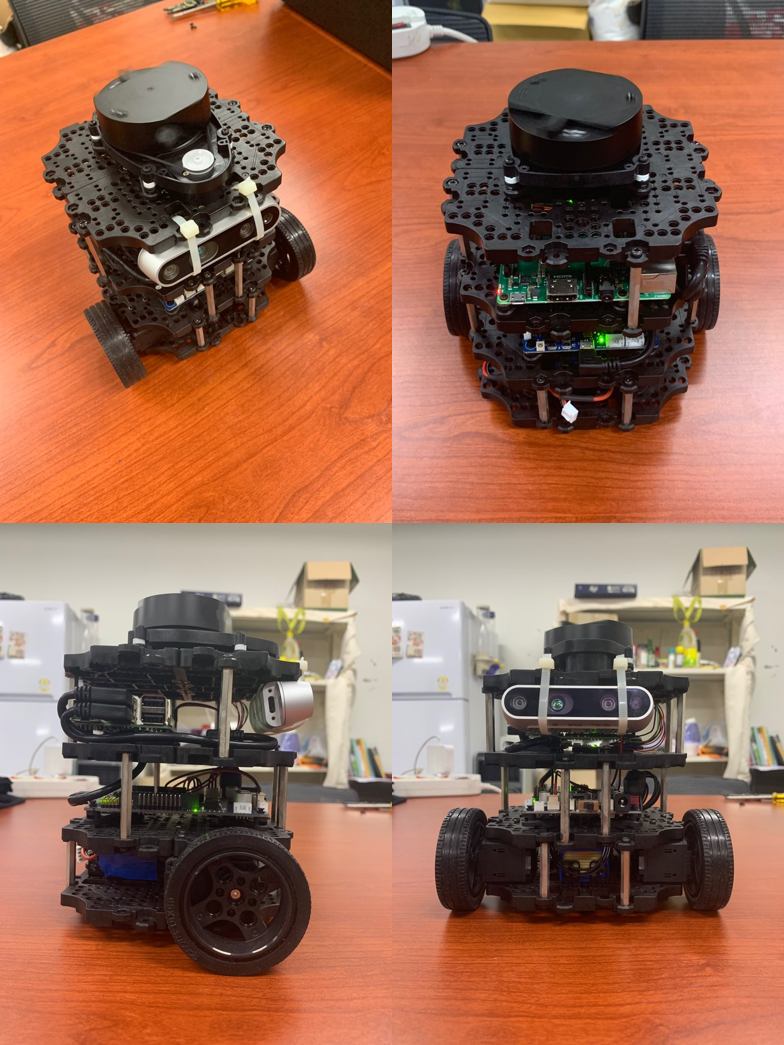
Robotis 사의 Turtlebot3 burger 모델의 로봇으로 미들웨어인 ROS(Robot Operating System)를 이용하여 제작한 application 예제는 많이 있고 쉽게 찾을 수 있다. 개체 추적 분야의 예로는 Lidar에 의존한 개체 추적 로봇을 찾을 수 있는데, 이에 Vision 기술을 추가하여 개체 추적 기능을 향상시키고자 한다.
- 주요 내용
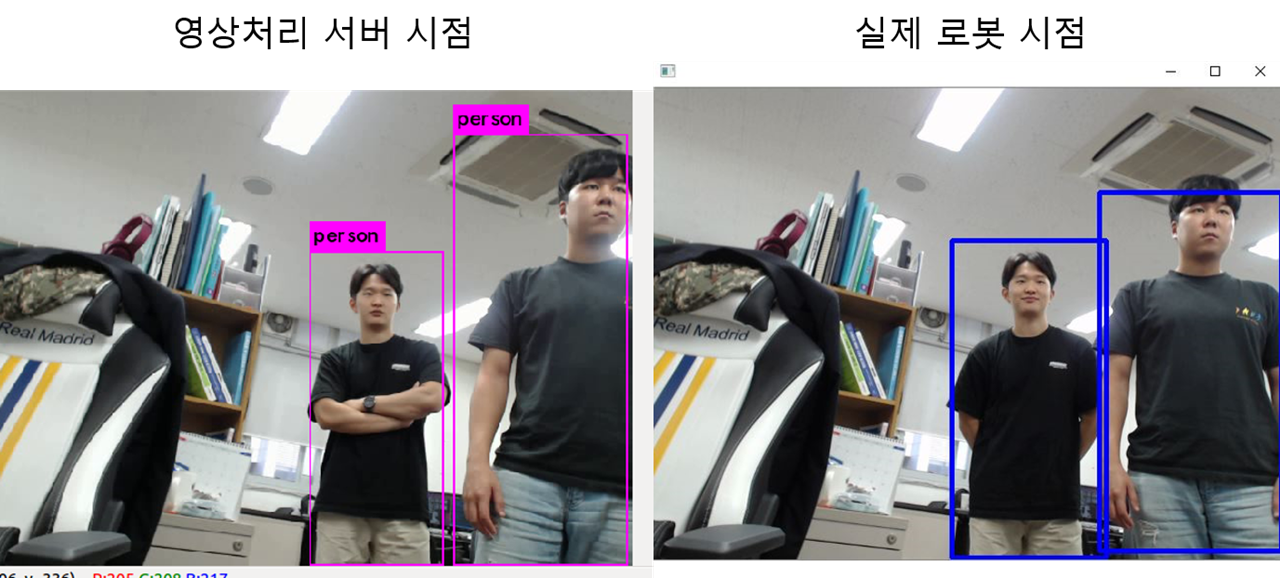
- 로봇을 활용한 컬러 분석을 기반으로 한 개체 인식을 통해 특정 개체를 높은 정확도로 인식할 수 있는 기술을 설계, 적용하여 인식률을 높일 수 있는 알고리즘에 관해 연구한다.
- SLAM 기술을 접목해 장애물을 지능적으로 헤쳐나가 지정한 개체에 도달할 수 있는 모습을 일차적 설계로 진행한다.
- Lidar를 중심으로 한 부가적인 센서를 이용하여 영상에서는 얻기 힘든 3차원적인 측정을 통한 개체 인식 및 지형 인식의 성능 향상을 연구한다.
2. 수행기간
작품 제작 내용 | 추진일정 | 비 고 | ||||
5월 | 6월 | 7월 | 8월 | 9월 | ||
터틀봇3 구동부 구현 | | | | | | |
영상기반 개체 인식 설계 | | | | | | |
SLAM을 이용한 추적 알고리즘 설계 | | | | | | |
하드웨어 센서 구동부 설계방안 정리 | | | | | | |
Lidar와 추가 센서 적용 및 정확도 향상 | | | | | | |
알고리즘 안정화 및 정확도 향상 방안 연구 | | | | | | |
최종결과물을 위한 안정한 디자인 설게 | | | | | | |
3. 개발작품 설명
- 효율적인 개체 추적 기능 설계
Robotis 사의 Turtlebot3 burger 모델의 로봇으로 미들웨어인 ROS(Robot Operating System)를 이용하여 제작한 application 예제는 많이 있고 쉽게 찾을 수 있다. 하지만 Lidar에 의존하여 로봇을 제어한다는 한계를 가지고 있다. Lidar는 사방의 거리를 정확하게 측정할 수 있는 유용한 센서지만, Lidar만으로는 로봇의 성능을 최대화할 수는 없다. 눈을 감은 채 긴 지팡이로 사방에 땅을 두드리며 걷는 것과 마찬가지다. 여기에 눈이 생긴다면 어떨까? ‘내 근처의 얼마 거리에 장애물이 있는지’에서 ‘어떤 개체가 있는지’가 추가된다. ‘어떤 개체가 있는지를 인식할 수 있다‘는 말은 특정 물체에 대한 행동을 취할 수 있음을 의미한다. 그러므로 로봇에 Vision기술을 추가함으로써 높은 인식률을 가지는 효율적인 개체 추적이 가능해진다.
- Vision과 SLAM의 융합
SLAM 기술은 주변의 지형 장애물을 파악하여 2D 도면을 그리는 기술이다. 이 기술은 2D 지형 도면에 파악된 지형을 실시간으로 재수정하며 더욱 정확한 지형 정보를 얻을 수 있게끔 한다. SLAM은 Vision이 가지는 몇몇 미약한 점을 보완한다. Vision은 제한된 시야에서의 사물의 정확한 특성을 파악할 수 있지만, 그 사물까지는 거리와 각도, 그 사물까지 도달하기 위한 경로를 정확하게 파악하기는 어렵다. SLAM을 통해 지형을 파악하게 된다면, Vision을 통해 인식한 개체에 도달하는 경로가 유추할 수 있다.
- Machine Learning을 이용한 기능 향상
개체 인식을 넘어서 ‘특정 개체 인식’에 높은 정확도와 확장성을 가지기 위해서는 Machine Learning이 필요하다. 추적할 개체가 사람이라 할 경우 단순한 알고리즘만으로는 특정한 사람을 높은 정확도로 구별하기가 쉽지 않다. 사람의 앞모습, 옆모습과 뒷모습 모두 다르다. 알고리즘으로 A라는 사람을 정확하게 인식할 수 있게끔 설계한다면, A를 제외한 모든 사람들은 인식할 수 없을 것이다. 또한, A를 100% 인식한다 할지라도 A가 아님에도 다른 사람이나 사물을 A라고 인식하는 ‘거짓 긍정’이 발생한다. ‘A만은 A로‘ 정확하게 인식하기 위해서는 A가 아닌 것을 정확하게 인식해야 한다. Machine Learning은 이러한 기능 구현에 있어서 적합한 기술이다. 반복 학습을 통해 정확도는 점점 향상되고, 다양한 환경에서 적용될 수 있다.
4. 활용방안
- Vision과 Lidar를 활용한 제 3의 디바이스 개발
Lidar가 가지는 ‘정확한 측정’과 ‘4방향 측정’의 장점, Vision이 가지는 ‘특정 개체 인식’과‘영상 데이터 가공’장점을 결합하여 서로의 단점을 보완하고, 성능이 향상된 제 3의 디바이스를 개발할 수 있다.
- 드론에 탑재하여 공장 등 산업시설에서의 사용
드론을 통해 공간의 제약에서 벗어나 광범위한 영상을 처리하고, 손을 자유롭게 활용하지 못하는 상황에서도 드론을 이용하여 손쉽게 사물을 운반할 수 있으며, 인간이 감지하지 못하는 사각지대의 위험 요소 역시 드론을 통해 안내받고 대처할 수 있다.