

[A-09] 어벤져스-재난 대응 로봇 시뮬레이터
- 김호준
- 인천대학교
- 작품구분일반형
- 공개여부비공개
- 카테고리기계
- 등록일2019-09-11
- 팀원(공동개발자)백건하, 조현성
- 출품 경진대회제15회 인천대학교 창의적종합설계경진대회 참가팀 모집
- 0
- 0
- 1,513
상세설명
1. 수행배경
- 실질적인 로봇 개발에 앞서 시뮬레이터를 통해 로봇의 움직임 및 제어 방법 등 전반적인 과정을 파악하기 위해 현 프로젝트를 추진하게 되었습니다.
- 최근에 발생한 속초 산불, 2011년 일본에서 발생한 후쿠시마 원자력 발전소 사고 등 재난 사고 발생 시 섣불리 사람이 투입하여 대처할 수 없었기에 더 큰 재앙을 불러일으켰고 현재까지도 많은 사람들이 힘들어 하고 있습니다. 그것에 영감을 받아 재난 사고를 대응할 로봇의 필요성을 알리기 위해 시작하였습니다.
2. 수행기간
- 4월 - 구체적인 시뮬레이이터의 구성과 개발 방향 설립
- 5월 - 로봇의 물리 · 기계학적 분석과 수행해야 할 작업 분석
- 6, 7월 - SolidWorks를 이용한 로봇 및 재난 환경 설계
- 8월 - 로봇의 구조를 고려하여 순차적으로 Joint 삽입 / Lua Script 제작
- 9월 - 재난 대응 로봇 시뮬레이터의 임무 수행 영상 채취 / 키보드, 모니터 등 원활할 시뮬레이터 실행을 위한 장비 구축
3. 개발작품 설명
- 가상 시뮬레이터로써(V-REP) SolidWorks로 제작한 URDF 파일이 삽입됩니다. 이로 인해 구현된 재난 사고 현장에서 로봇이 어떻게 임무 수행을 하게 될지 가시적으로 확인할 수 있습니다.
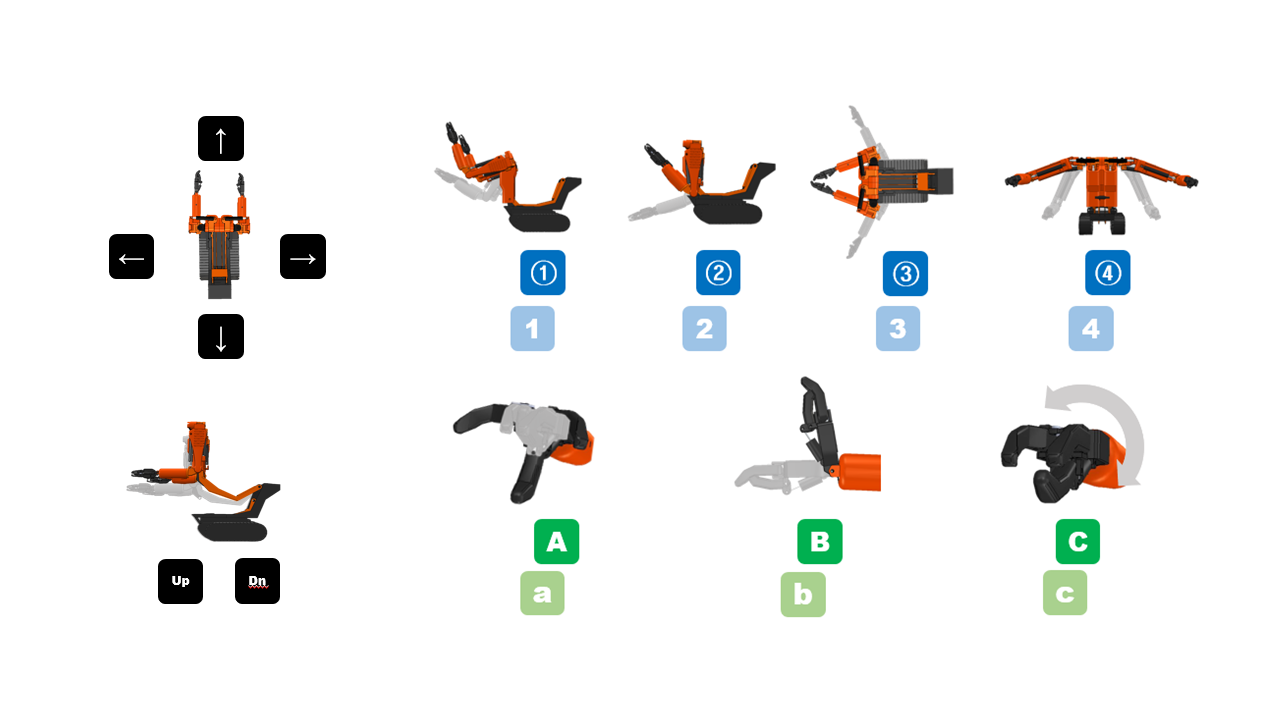
- 시뮬레이터 상에 ASCII 코드를 활용한 Lua Script를 제작하여 키보드로 로봇을 제어합니다.
4. 활용방안
- V-REP 로봇을 통해 실제 재난 사고 대응 로봇의 임무 수행 예측 정보를 수집할 수 있습니다.
- 실제 재난 사고 대응 로봇의 기초 설계도를 제공할 수 있습니다.
소개 영상
소개 슬라이드
Robot simulator from bright327