
[13] AI를 활용한 선로 균열 탐지 로봇 (TCD)
- 심현수
- 인천대학교
- 작품구분일반형
- 공개여부공개
- 카테고리전자, 기계, 교육/연구
- 등록일2024-09-13
- 팀원(공동개발자)심현수 (기계공학과 3학년), 이동현 (컴퓨터공학과 2학년), 김태훈 (기계공학과 1학년), 한유찬 (에너지화학공학과 1학년)
- 출품 경진대회제20회(2024년) 창의적종합설계경진대회
- 0
- 0
- 1,784
상세설명
1. 수행배경
- 선로의 외부 균열로 인한 탈선사고
- 위험한 선로 위 점검 인력 사고
- 점검 미흡으로 인한 사고 및 운행지연
2. 수행기간
- 24. 5 ~ 24. 9
3. 개발작품 설명
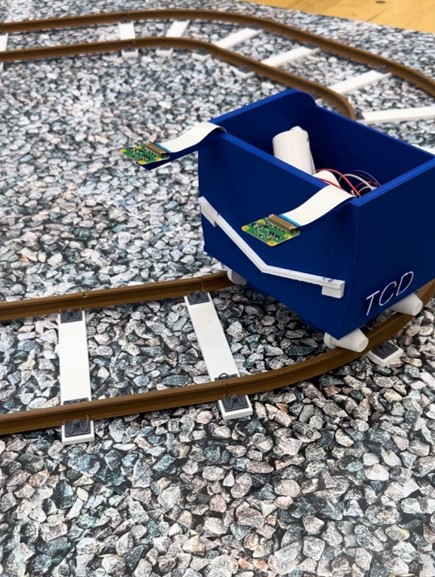
- 실제 선로 환경을 구현하기 위해 한국철도공사에서 제공하는 규격표와 AI-hub에서 제공하는 “철도 선로 상태 인식 데이터“ 사진을 참고하여 60kg KR 레일 및 침목, 체결장치를 1:11로 축소하여 제작 . 120mm * 120mm 크기의 육각형 트랙을 구성하여 여러 종류의 균열이 발생한 비정상 레일을 탐지하는 시연 환경 설계.
- 로봇의 바퀴는 테이퍼 형태와 플랜지 구조를 활용하여 직선 및 곡선에서 안정적인 주행 가능.
- 전륜 좌우 바퀴에 각각 모터를 부착하여 차축을 제거하였고 로봇 구동계를 단순화하여 점검 및 수리 용이성을 높임.
-
AI-hub 철도 선로 상태 인식 데이터의 많은 카테고리 중 선로, 결합부, 침목 데이터를 중심으로 전처리하였고
자체 제작 선로를 통해 다양한 데이터 생성 후 roboflow를 활용해 라벨링 진행
4. 활용방안
-
외부 균열은 탈선 사고와 직결되는 문제로 이를 운행 전 점검하여 탈선사고를 예방. 인력중심인 현 관리 시스템을 무인화 관리 시스템으로 대체하여 위험한 철로 위 빈번하게 발생하는 철로 인명 사고 예방. 터널 및 지하선로와 같은 작업환경에서 분진과 초미세먼지로 인한 작업인부들의 건강 문제 또한 해결.
-
추후 카메라를 여러 대 추가하여 촬영 각도를 다양화하고 분기기, 궤광에 대한 데이터셋을 구축하여 완전한 무인 점검시스템 구축 계획. 각 구간에 대한 레일 상태와 균열 정보를 데이터화하여 관리.
-
40억원의 초고가 레일탐상차 대신 TCD를 여러 대 이용하여 점검 빈도수를 높이고 화석연료 대신 리튬이온 전지를 이용하여 친환경적인 운행 가능.
소개 영상
소개 슬라이드
정보가 없습니다.