
정보가 없습니다.
Platoon RCcar
- 박세영
- 인천대학교
- 작품구분일반형
- 공개여부공개
- 카테고리웹/앱
- 등록일2015-09-24
- 팀원(공동개발자)
- 출품 경진대회미신청
- 0
- 0
- 1,737
상세설명
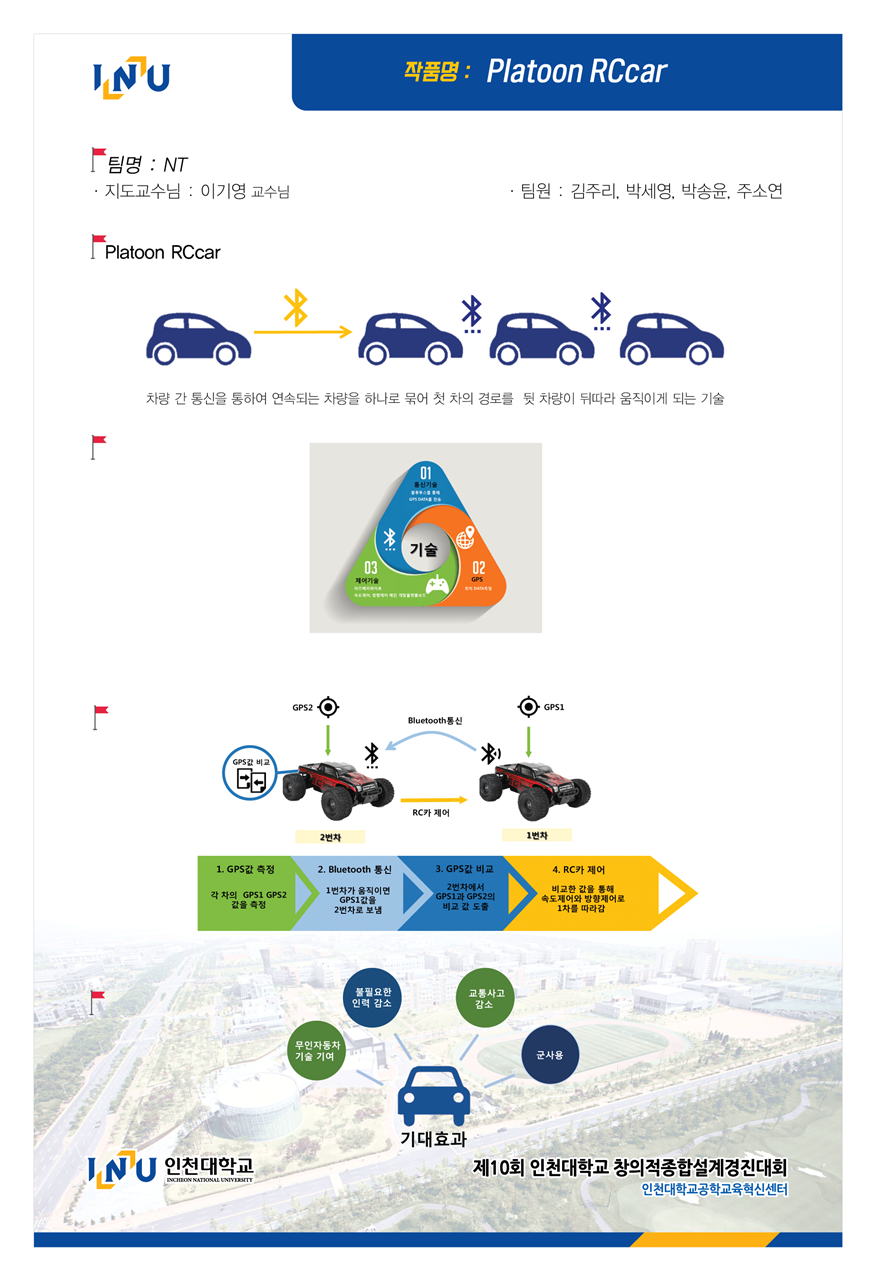
[전체적인 흐름도]
[3차] 라즈베리파이 - gps, 안테나 블루투스모듈, 나침반센서,모터드라이버
첫번째 rc카의 gps 값을 블루투스 통신을 통해 후속 rc카에 전송한다.
ê
첫번째 rc카의 gps 정보를 받은 두번째(후속) 차량은 자신의 gps값과 비교하여 거리계산을 시작한다.
ê
선두 차량과 후속 차량의 거리가 임의의 일정 값 보다 크면 속도를 증가시켜 두 차간의 간격을 줄이고, 반대의 경우 속도를 감소시켜 두 차간의 충돌을 방지한다.
ê
나침반센서를 이용해 각도가 일직선이 아닌 경우 바퀴의 각도를 제어하여 1차의 방향에 맞도록 바꿔준다.
ê
5. 2차 3차도 마찬가지로 같은 방식으로 연결하고 진행된다.
[S/W 구성도]
[1차] 1차gps 수신 è1차 gps값 2차로 블루투스송신
[2차] 2차gps 수신è1차 gps값 블루투스수신 è거리, 각도계산è일정간격 기준으로
속도제어
2차gps 수신è 2차gps값 3차로 블루투스송신
[3차] 3차 gps수신è2차 gps값 블루투스수신è거리, 각도계산è 일정간격 기준으로
속도제어
[H/W 구성도]
[1차] 라즈베리파이 - gps,안테나, 블루투스동글
[2차] 라즈베리파이1 - gps,안테나,블루투스모듈,나침반센서,모터드라이버
라즈베리파이2 - gps,안테나 블루투스동글
[3차] 라즈베리파이 - gps, 안테나 블루투스모듈, 나침반센서,모터드라이버
소개 영상
소개 슬라이드
정보가 없습니다.